Lecture 1: Algorithms & Analysis
Algorithm
-
A clearly specified set of instructions to be followed to solve a specific problem
- Adding two n-digit numbers
- Sorting a list of n names
- Finding one student’s name among N students
-
This N is important
- The number of items we are dealing with
- What happens as N grows very large
-
Sequential search → O(N) time
-
Binary search → O(log N) time, but the list must be sorted
-
2³² is 4 billion → only 32 comparisons to search all 8 billion people if you cut in half each time
Important Questions About Algorithms
- Is it correct?
- How much extra memory does it require? → memory complexity → see how memory is physically organized in ICS 51
- How long does it take? → time complexity
The analysis of these two questions is critical to algorithm selection
T(N)
- The time required for an algorithm to run on input of size N
- Simple instructions → +1 operation (+, −, ·, /, …)
- Loops → sum of nested instructions times the number of loop iterations
- Function calls → T(N) of the called function
- If/else → maximum of either branch plus the cost of the condition
- Only one branch executes, so take the worst case PLUS the additional check of the condition (which can involve multiple checks)
How to Report T(N)
- State the actual polynomial and say it is equal to the following
- Count the number of run-time instructions
Example: Summing 1 to N
int sum( int N )
{
int result = 0; // 1
for( int i=1; // 1
i <= N; ++i ) // 2 LOOP N TIMES -> N * ( 2 + 2 = 4)
result = result + i; // 2
return result; // 1
}- T(N) = 4N + 3
int sum( int N )
{
return N * ( N + 1 ) / 2;
}- T(N) = 4
- The return adds 1 plus all the expressions
Example: Strange Sum
int strangeSum( int A[N] )
{
int total = 0; //1
for(int i=0; //1
i < N; ++i ) // n-1, 1
total = total + A[i-1] * A[i]; //4
return total; //1
}- Array indexing → cost of the index plus 1 (same rule as return)
- T(N) = 8N + 3
- Outside of loop there are 3 operations
- The 8 inner operations happen from 0 to N times → total of N times
Example: Bubble Sort
void swap( int & a, int & b ) // T(N) = 3
{
int t = a; a = b; b = t;
}
void bubbleSort( int A[N] ) // A tricky one...
{
for ( int a = 0; a < N; a++ ) // RUNS N times
for ( int b = N - 1; b > a; b-- ) // sum of all N integers with the combination of 2 loops
if ( A[b-1] > A[b] ) // condition is 4 // IF is 4 + max(6,0) = 10
swap( A[b-1], A[b] ); // then part is 6 (the accessing is 3 plus the call of the function)
}- N · (N − 1) / 2 is the closed form for the sum of N integers
- T(N) = 10 · (N · (N + 1)) / 2 →
- 5 · (N² + N) →
- 5N² + 5N + 1 → final form
GitCodings
// What is T(N) of strlen(), if N is the length of s?
int strlen( char *s ) {
int len = 0;
for ( int i = 0; s[i] != 0; ++i )
++len;
return len;
}
// My Guess: T(N) = 4N + 3
// Right Answer: T(N) = 4N + 3int strchr( char c, char *s ) // V1
{
for ( int i=0; i < strlen(s); ++i )
if ( s[i] == c )
return i;
return -1;
}
// My Guess: T(N) = 2(4N + 3) + 2- The strlen is 4N + 3 plus 2 for the other 2 operations in the for loop
- N · (4N + 5 + 3) for the if statement, then plus 2 for the outside of the loop
- T(N) = 4N² + 8N + 2
int strchr( char c, char *s ) // V2
{
int len = strlen(s);
for ( int i=0; i < len; ++i )
if ( s[i] == c )
return i;
return -1;
}- T(N) =
- First: initialize len plus strlen → 4N + 3 + 1
- Loop runs N times with 5 operations inside
- Return → +2
- 4N + 4
- 5N + 2
- T(N) = 9N + 6 → correct answer!
// What is T(N) of strchr(), if N is the length of s?
int strchr( char c, char *s ) // V3
{
for ( int i=0; s[i] != '\0'; ++i )
if ( s[i] == c )
return i;
return -1;
}- 1 for the initialization
- 6N + 2 → confident
- Real answer is: that I am a dawg
Asymptotic Analysis
- As N gets larger, what is the performance hit?
- When you multiply by large numbers, things grow rapidly
- Best Case
- Worst Case
- Expected Case (Middle)
Big-O Notation
- As N gets large, the lower-order terms are negligible
- We care most about the highest-order term
- T(N) = 4N² + 6N + 40
- T(N) = 2N⁴ + 1000N² + 30N + 2000
- Big-O (pronounced “big oh”)
- T(N) = O(f(N)) if there are positive constants c and n₀ such that T(N) ≤ c · f(N) when N ≥ n₀
- Don’t care about low orders of N
- Find what it is bounded by
- Big-O → upper bound (the closest function that bounds it from above)
- Omega → lower bound
- Theta → tightly bound (strictly exactly there)
Typical Growth Rates
| Function | Name |
|---|---|
| C | constant |
| log N | logarithmic |
| N | linear |
| N log N | log-linear |
| N² | quadratic |
| 2ᴺ | exponential |
| N! | factorial |
- 2³² is 4 billion
- 2³³ is 8 billion
- 10¹⁰⁰ is about 70!
Ranking of Big-O (Slowest Growth to Fastest)
- O(1)
- O(log N)
- O(N log N)
- O(N²)
- O(2ᴺ)
- O(N!)
Reporting Big-O → just say “Big-O of N²” and that’s all
Activity
- T(N) = 10N⁴ + 2N² log N − N³ → O(N⁴)
- T(N) = log₂ N + N log N + N² → O(N²)
- T(N) = Nᴺ + N! → O(Nᴺ)
- T(N) = 2^(N/2) + 3N log N → O(2ᴺ)
Lecture 2: Unordered Lists
Unordered Lists
- Lists may be
- Unordered
- Ordered
- Sorted
- Typical operations
- insert, find, remove, length, print
- Lists may be implemented as
- An array list (within an array) → memory is a linear array at the hardware level
- A linked list (using nodes with links/pointers)
- Always consider time complexities → Big-O from Lecture 1
Unordered List: Implemented as Array
- What data members do we need?
- The array
- Capacity → physical size (possible), don’t exceed capacity
- Current size → logical size (actual size)
- Think about each operation (algorithm)
- insert
- find
- remove
- How can each be implemented efficiently given the requirements? (Unordered)
Unordered Array List
// Example is a List of char
class UnorderedArrayList {
char * buf; // an array of List Elements (char)
int capacity;
int size;
public:
UnorderedArrayList(int cap)
:buf{new char[cap]}, capacity{cap}, size{0}
{ }Adding to Front vs Adding to End
sizeis the index of the next available slot- Adding to the front causes you to shift all existing elements over
Efficiency on Removal
- Removal can be done by replacing with the last element and decrementing size
- Don’t have to null out values → they are effectively gone
Insert
void error(string msg) {
cerr << "WTH: Error: Who wrote this code" << msg << endl;
}
// adds 'c' where it belongs in this list
void insert(char c) {
// This was added post checking the first normal case
if (is_full()) {error("UAList::insert() into full list");}
buf[size++] = c;
// Notice the post-increment: it uses the original value and THEN increments
}- Write the first normal case
- Add error checking (beginning in this case)
Find
// returns index of 'c'
int find(char c) {
for (int i = 0; i < size; ++i) {
if (buf[i] == c) {return i;}
}
error("Not found");
}Remove
// removes first occurrence of c
int remove(char c) {
for (int i = find(c); i < size - 1; i++) {
arr[i] = arr[i + 1];
}
--size;
}- Not sure about this one → figure it out later
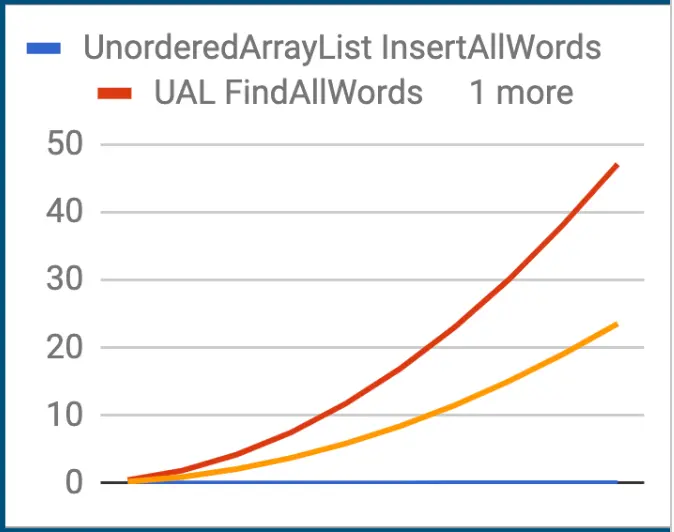
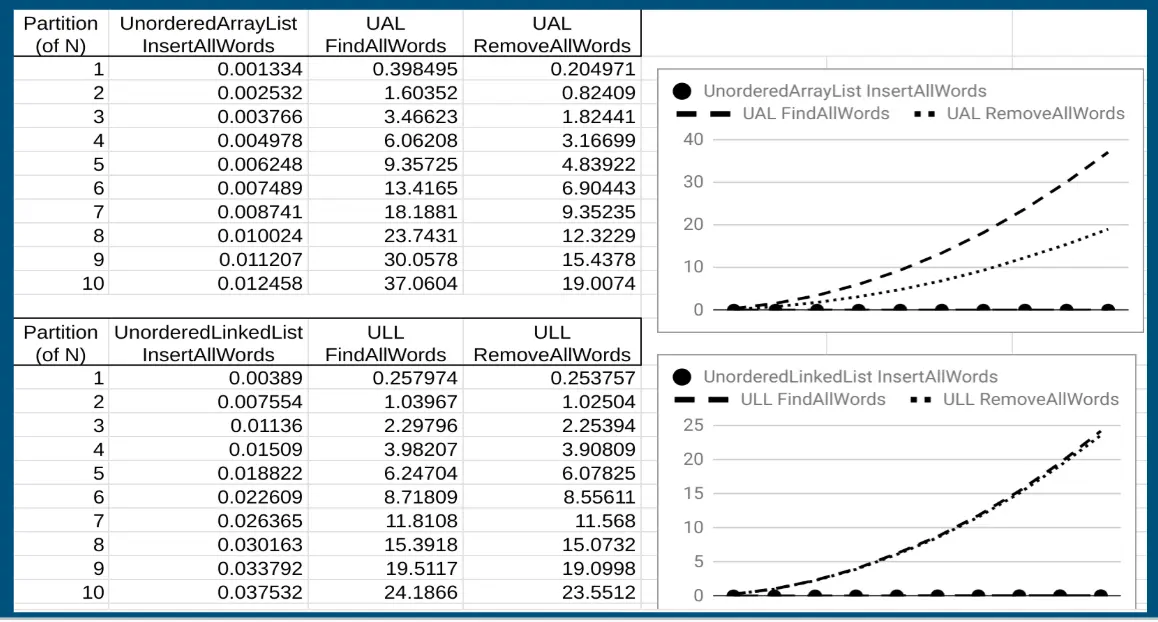
Measuring Performance
- Divide the data into partitions (e.g., 10)
- Measure on first partition
- Then first and second
- Then first, second, third, etc.
- Plot N vs T(N)
- Graph shows the time complexity of the function
- Must be careful to time only the work of interest
- start() and stop() timer around the work
- We measure insert_all(), find_all(), remove_all() → why?
- There is jitter (variation) in data, and under large data sets it’s more visible
- No zigzag line → should be a smooth curve
- 45,392 words is specific to our word set
- Start with 1/10th of the data, then 2/10ths, etc.
Framework vs Library
- A library works within your software. Your software works inside a framework.
- To build a framework you need virtual functions and abstract classes
- Write the measurement code only once → that’s the framework’s job
Architecture vs Framework (Aside)
- Architecture → high-level, abstract plan for a system defining major components and their interactions
- Framework → concrete, reusable set of code and libraries that helps implement an application within the boundaries set by the architecture
Unordered List Implemented as Linked List
- Use a helper class
ListNode- Two data members:
data(string in this case)next(pointer to nextListNode)
- Two data members:
- Useful to write helper methods
- Allows more re-use of helper functions
- Allows recursion
- Simplifies non-static list methods
- Think about each operation:
insert→ insert at head (unordered, so position doesn’t matter)findremove
Singly Linked List Node
// ListNode helper class
struct ListNode {
char data;
ListNode * next;
};
ListNode * p = nullptr; // the empty list
p = new ListNode{d, p}; // adds d onto front of p
// Uses curly-brace (aggregate) initialization, not parens
// Data members must all be public for this to workLinked List insert()
class UnorderedLinkedList {
struct ListNode {
char data;
ListNode * next;
};
ListNode * head;
public:
UnorderedLinkedList() : head{nullptr} { }
void insert(char c) {
head = new ListNode{c, head};
}
};Linked List find()
class UnorderedLinkedList {
// private static helper — searches from node L
static ListNode * find(char c, ListNode * L) {
for (ListNode * p = L; p != nullptr; p = p->next) {
if (p->data == c)
return p;
}
return nullptr;
}
public:
char & find(char c) {
ListNode * p = find(c, head);
if (p != nullptr)
return p->data;
// else: do whatever is appropriate
// e.g., could add c to head of list, then return head->data
}
};Linked List length()
class UnorderedLinkedList {
static int length(ListNode * L) {
int count = 0;
for (ListNode * p = L; p != nullptr; p = p->next)
++count;
return count;
}
ListNode * head;
public:
int size() {
return length(head);
}
};Linked List remove()
class UnorderedLinkedList {
static ListNode * remove(char c, ListNode * L) {
// implementation left as exercise
}
ListNode * head;
public:
void remove(char c) {
head = ListNode::remove(c, head);
}
};Lecture 3: Sorted Lists & Binary Search
Benchmarking Unordered Lists — Theory vs. Reality
-
The measured times don’t match the predicted Big-O complexities — why?
-
Array List anomalies:
- Insert all → predicted O(1) per insert, measured O(N) total — makes sense, we’re calling O(1) insert N times
- Inserting at the end in the same order as the file → truly O(1) each
- Find all words → predicted O(N) per find, but measured ~100× slower than insert
- Calling O(N) find N times → O(N²) total
- Remove all words → should also be O(N²) like find-all, but measured at roughly half the time of find-all
- Why half? The “swap-to-back” removal trick: find the word, swap it with the last element, decrement size → the removal itself is O(1)
- Each successive removal shrinks the array, so on average you’re searching through N/2 elements → total work ≈ N²/2
- First removals are fast (element might be near the front or the array is large but you get lucky), later removals search a smaller array but from the start
- Insert all → predicted O(1) per insert, measured O(N) total — makes sense, we’re calling O(1) insert N times
-
Linked List:
- Insert all → O(1) per insert (prepend to head), O(N) total
- Find all words → O(N) per find × N words → O(N²) total
- Remove all words → O(N) per remove × N words → O(N²) total
-
Why does the array’s remove-all take half the time but the linked list’s doesn’t?
- Array remove uses the swap-to-back trick → each removal is O(1) after finding, and the shrinking array means average search length is N/2
- Linked list remove has no such shortcut — you traverse to find the node, then unlink it (O(1) unlink, but still O(N) traversal each time), and unlinking doesn’t reduce traversal time the same way because you still walk from the head every time
- Both end up O(N²), but the array version has a constant factor of ~½
-
Aside: What does N · log N look like? → just a tiny bit more than O(N) — nearly linear
Other List Types
- We’ve studied unordered lists, but there are others:
- Circular lists → e.g., repeat playlist in a music player — last node points back to first
- Doubly Linked List → e.g.,
std::listin C++- O(1) insert(), O(1) remove() (given a pointer to the node), O(N) find()
- Ordered lists → items retained in insertion order
- Operations: insert, find, remove
- e.g.,
std::string(characters in order of insertion)
- Sorted lists → items retained in sorted order
- e.g., student roster, phone book
- Performance tradeoff aside:
findis the most frequently called operation in practice- Unordered lists → insert is the fast one (O(1) prepend/append)
- Sorted lists → find is faster (binary search possible on arrays)
Sorted Lists
- Similar to unordered lists, but items are maintained in sorted order
- Order may be ascending or descending
- Approach: insert incrementally in the right spot (not “dump everything in, then sort” — that’s eager sorting and it’s wasteful)
- e.g., student roster, phone book, book index
- Typical operations: insert, find, remove, length, print
- May be implemented as:
- Array list:
find→ O(log N) using binary searchinsert→ O(log N) to find position + O(N) to shift elements right → O(N) totalremove→ O(log N) to find + O(N) to shift elements left → O(N) total
- Linked list:
find→ O(N) linear scan (can’t do binary search — no random access)insert→ O(N) to walk to the right spot + O(1) to link → O(N) totalremove→ O(N) to find + O(1) to unlink → O(N) total
- Array list:
- How to keep it sorted? → Incrementally — insert each new element in its correct position
Quick recall: 2³² = ~4 billion, 2³³ = ~8 billion
Sorted Array List — Class Definition
class SortedArrayList {
char * buf;
int capacity;
int size;
public:
SortedArrayList(int cap)
: buf{new char[cap]}, capacity{cap}, size{0}
{ }
};- Member initializer list order: the initialization happens in order of declaration of data members, NOT the order they appear in the initializer list
- Here the declaration order is:
buf,capacity,size— so they initialize in that order - This is correct and safe here because
buf’s initialization (new char[cap]) uses the constructor parametercap, not the membercapacity - If
buf’s init depended oncapacitybeing set first, we’d have a bug sincebufis declared (and thus initialized) beforecapacity
- Here the declaration order is:
Binary Search (Array)
// Returns the index where ‘c’ IS or WHERE IT WOULD GO if inserted
// This lets us reuse binary_search for find, insert, AND remove
int binary_search(char c, char A[], int low, int high) {
while (low <= high) {
int mid = low + (high - low) / 2; // avoid overflow vs (low+high)/2
if (A[mid] == c)
return mid; // found it
else if (A[mid] < c)
low = mid + 1; // search right half
else
high = mid - 1; // search left half
}
return low; // not found — low is the insertion point
}- Returns the insertion point — the index where
cwould go to maintain sorted order - If the element exists, it returns its index; if not, it returns where it should be
- Complexity: O(log N) — halving the search space each iteration
Binary Search on a Linked List?
- You technically can’t do efficient binary search on a linked list — there’s no O(1) random access
- To reach the “middle” node you’d have to walk N/2 links → O(N)
- Doing that recursively still ends up O(N) total (N/2 + N/4 + N/8 + … ≈ N)
- So linked list find remains O(N) — binary search doesn’t help here
- This is the key advantage of sorted array lists over sorted linked lists
Using binary_search as a Helper
binary_search()is the core helper —find,insert, andremoveall use it- find(c): call
binary_search(c, buf, 0, size-1)→ get indexi→ check ifbuf[i] == c→ O(log N) - insert(c): call
binary_searchto get insertion point → shift elements right → placec→ O(N) due to shifting - remove(c): call
binary_searchto find it → shift elements left → O(N) due to shifting - Not all O(N) are equal — the constant factor matters when complexities are the same
Sorted Array List: find()
// Uses binary_search helper — O(log N)
bool find(char c) {
int i = binary_search(c, buf, 0, size - 1);
return (i < size && buf[i] == c);
}copy_down — Shifting Elements Left (for remove)
// Array version — shift elements left to fill the gap at index ‘pos’
void copy_down(char A[], int pos, int size) {
for (int i = pos; i < size - 1; ++i)
A[i] = A[i + 1];
}- Used in
remove(): find the element via binary search, then shift everything after it one position left - O(N) in the worst case (removing the first element)
copy_up — Shifting Elements Right (for insert)
// Array version — shift elements right to make room at index ‘pos’
void copy_up(char A[], int pos, int size) {
for (int i = size; i > pos; --i)
A[i] = A[i - 1];
}- Used in
insert(): binary search for the insertion point, shift everything right, then place the new element - O(N) in the worst case (inserting at position 0)
Sorted Array List: insert() and remove()
void insert(char c) {
int pos = binary_search(c, buf, 0, size - 1);
copy_up(buf, pos, size); // make room
buf[pos] = c;
++size;
}
void remove(char c) {
int pos = binary_search(c, buf, 0, size - 1);
if (pos < size && buf[pos] == c) {
copy_down(buf, pos, size);
--size;
}
}Unordered List: equal()
// Two unordered lists are equal if they have the same elements (in the same order for this version)
bool equal(const UnorderedArrayList & other) const {
if (size != other.size) return false;
for (int i = 0; i < size; ++i) {
if (buf[i] != other.buf[i]) return false;
}
return true;
}Testing Aside
- Nominal testing → test normal/expected inputs (the “happy path”)
- Boundary conditions → test edge cases:
- Front and end of structure
- Empty string and single-character string in
reverse_string - Empty list, single-element list, duplicate elements
Lecture 4: Linked Lists
Sorted Linked List: Find
- If the list is sorted and we pass the value we’re searching for → stop early
- No point continuing once
curr->data > c
- No point continuing once
Writing Methods Recursively
- Watch out for large N on an O(n) recursion → blows the stack
- Prefer iteration when depth can grow with input size
Pointers
- Pointers are cheap
- Common pattern for traversal/mutation →
prev,curr,next
Sorted Linked List: insert()
// return list with c added in the correct (sorted) spot
static ListNode * ListNode::insert(char c, ListNode * L) {
ListNode * node = new ListNode(c);
// empty list or insert at front
if (L == nullptr || c <= L->data) {
node->next = L;
return node;
}
// find the node after which c belongs
ListNode * curr = L;
while (curr->next != nullptr && curr->next->data < c) {
curr = curr->next;
}
node->next = curr->next;
curr->next = node;
return L;
}Sorted Linked List: find()
// return pointer to node containing c, nullptr otherwise
// sequential search down L, stop when c >= L->data (sorted list)
static ListNode * ListNode::find(char c, ListNode * L) {
while (L != nullptr && L->data < c) {
L = L->next;
}
if (L != nullptr && L->data == c) return L;
return nullptr;
}Sorted Linked List: remove()
// return list with c removed
static ListNode * ListNode::remove(char c, ListNode * L) {
if (L == nullptr) return nullptr;
// case: removing the first node
if (L->data == c) {
ListNode * rest = L->next;
delete L;
return rest;
}
// walk with prev/curr, stop at match or past-it (sorted)
ListNode * prev = L;
ListNode * curr = L->next;
while (curr != nullptr && curr->data < c) {
prev = curr;
curr = curr->next;
}
if (curr != nullptr && curr->data == c) {
prev->next = curr->next;
delete curr;
}
return L;
}- Three cases to test:
- Maintain a
prevpointer - Test on a middle node
- Test on the first node
- Test on the last node
- Maintain a
Recursive Linked List remove()
// not suitable for O(N), but fun to write
static ListNode * ListNode::remove(char c, ListNode * L) {
if (L == nullptr)
return nullptr;
else if (L->info == c) {
ListNode * ret = remove(c, L->next); // remove all? or first?
delete L;
return ret;
}
else {
L->next = remove(c, L->next);
return L;
}
}SLL Remove Challenge
- Given pointer
Pto node containing itemV→ remove V in O(1) time - Others may have pointer to same node P points to
- How can you do this?
- Hint: data is not tied to the ListNode
SLL Remove Clever Trick
// data is not tied to the ListNode!!!
static void remove(ListNode * P) {
// P is pointing to node with value to remove
ListNode * to_die = P->next; // gonna delete next node instead
P->info = P->next->info; // copy data & next from P->next
P->next = P->next->next;
delete to_die; // delete the next node
}
// does not handle deleting the last element of the list
// works for insert() V before value at P too!Bubble Sort
void bubble_sort(int A[], int N) {
int i, j;
for (i = 0; i < N; ++i)
for (j = 0; j < N - i; ++j)
if (A[j] > A[j+1])
swap(A[j], A[j+1]);
}Lecture 5: Stacks & Queues
Overview
- Containers for elements → element type is a template parameter
- Elements are inserted and removed → the difference is the order they come out
- Useful for many algorithms
- Browser back button
- Line of customers waiting to check out
- Print requests
- Matching parentheses
- etc. (toooo many options)
Pre-Test Self-Check
- What is the insert/remove behavior of a queue?
- FIFO → First-In-First-Out, elements come out in the same order they went in
- What are the standard operations on a queue?
enqueue,dequeue,front/peek,is_empty,is_full
- How can you implement a queue using an array (with an initial capacity) so each operation is O(1)?
- Circular buffer with
frontandrearindices → enqueue at rear, dequeue from front, both O(1)
- Circular buffer with
- How can you implement a queue using a singly linked list so each operation is O(1)?
- Keep both
headandtailpointers → insert at tail, pop at head
- Keep both
- What errors are likely with a queue?
dequeue()orpeek()on an empty queueenqueue()on a full queue
Queues
- Works like the check-out line at the grocery store → FIFO
- Applications:
- Print queue on a computer
- Real waiting lines → food, movie tickets, etc.
- Communication between concurrent tasks
- Waiting list to get into a full class
Queue Interface
-
type "object"can be any type -
void enqueue(object v)→ inserts v into rear of Queue -
object dequeue()→ removes and returns object from front of Queue -
object front()orpeek()→ returns object at front of Queue without removing it -
bool is_empty()→ true iff Queue is empty -
bool is_full()→ true iff Queue is full -
void error(char msg[])→ prints message, throws exception
Queue Errors
dequeue()orfront()/peek()on an empty Queueenqueue()on a full Queue- Queue user should check before calling
- Any error should:
- Print a specific error message
- (maybe) throw an appropriate exception
Queue As An Array
Circular buffer → key to O(1) operations
- Fixed-size array with
frontandrearindices - When an index walks past the end of the array → wraps back around to the start
- Advance indices via modulo →
rear = (rear + 1) % capacity - Example: capacity = 5, rear = 4 → after one enqueue,
rear = (4 + 1) % 5 = 0
How to detect when the array queue is empty?
front == rear
How to detect when the array queue is full?
- Problem: if we just use
front == rear, that’s ALSO true when the queue is empty → ambiguous - Two standard fixes:
- Leave one slot unused → allocate
capacity + 1slots, queue is full when(rear + 1) % capacity == front. That’s the reason for the+1in the constructor — it reserves one slot so full and empty have different signatures. - Keep a size counter → queue is full when
size == capacity. Simpler logic but nowsize,front, andrearall have to stay in sync on every operation → more bookkeeping.
- Leave one slot unused → allocate
class ArrayQueue {
object * buf; // base of circular array
int capacity, front, rear;
ArrayQueue(int maxSize)
: capacity(maxSize + 1), front(0), rear(0),
buf(new object[maxSize + 1]) // +1 reserves a slot to disambiguate full vs. empty
{ }
};Aside → Exit & main()
main()isn’t called directly by the user → the runtime’s hand-coded startup assembly sets up argc/argv and calls itexit()flushes and closes all open files before the process terminates
Queue As An Array: Operations
void enqueue(object v) {
if (is_full()) error("enqueue on full queue");
buf[rear] = v;
rear = (rear + 1) % capacity;
}
object dequeue() {
if (is_empty()) error("dequeue on empty queue");
object result = buf[front];
front = (front + 1) % capacity;
return result;
}
bool is_empty() { return front == rear; }
bool is_full() { return (rear + 1) % capacity == front; }- Pattern → check error cases first, then do the normal operation last
Queue As Linked List
- For O(1) operations → must keep both
headandtailpointers- Head is the front, tail is the rear → enqueue at tail, dequeue at head
- Add to either end in O(1)
- Cannot remove from the tail in O(1) (singly linked → no prev pointer, would need to walk the list to find the new tail)
- When dequeuing the last element → must fix up both
headandtailback tonullptr
class LinkedQueue {
LinkNode * head;
LinkNode * tail;
LinkedQueue() : head(nullptr), tail(nullptr) { }
bool is_empty() { return head == nullptr; }
bool is_full() { return false; } // limited only by heap
void enqueue(object v) {
LinkNode * node = new LinkNode(v, nullptr);
if (is_empty()) head = tail = node;
else {
tail->next = node;
tail = node;
}
}
object dequeue() {
if (is_empty()) error("dequeue on empty queue");
LinkNode * old = head;
object result = old->data;
head = head->next;
if (head == nullptr) tail = nullptr; // queue now empty → fix tail too
delete old;
return result;
}
};Queue In C++ STL
#include <iostream>
#include <queue>
using namespace std;
int main() {
queue<int> Q;
for (int i = 0; i < 5; ++i)
Q.push(i);
for (; !Q.empty(); Q.pop())
cout << Q.front() << ' ';
cout << endl;
}Pre-Test Self-Check
- What is the insert/remove behavior of a stack?
- LIFO → Last-In-First-Out
- What are the standard operations on a stack?
push,pop,top
- How can you implement a stack using an array (with an initial capacity) so each operation is O(1)?
topindex starts at 0 (next available slot) →buf[top++] = valuefor push,--topfor pop- All operations on the same end of the array → no shifting needed
findis O(N) — but find isn’t a stack operation anyway
- How can you implement a stack using a singly linked list so each operation is O(1)?
- Insert at head →
head = new ListNode(head, data) - Remove from head
- Search would still be O(N), but again not a stack op
- Insert at head →
- What errors are likely with a stack?
pop()ortop()on an empty stackpush()on a full stack
Guard Clauses
- Write the happy path first → the normal-case logic
- Then add error checks above it as guards
- Keeps the main logic uncluttered and the error cases obvious at the top
Stacks
- Works like a stack of plates in a cafeteria → LIFO
- Applications:
- Forward/back in a web browser
- Balancing parentheses
- Call stack for function parameters and return addresses
- Evaluating arithmetic expressions
- Holding nodes during graph traversals
Stack Interface
-
type "object"can be any type -
void push(object v)→ places v on the top -
object pop()→ removes and returns the object from top -
object top()→ returns object at top without removing it -
bool is_empty()→ true iff stack is empty -
bool is_full()→ true iff stack is full -
void error(char msg[])→ prints msg, throws exception
Stack Errors
pop()ortop()on an empty stackpush()on a full stack- Stack user should check before calling
- Always write an
errorhelper:void error(string msg) { cerr << "Error: " << msg << endl; }
- Any error should:
- Print a specific error message
- (maybe) throw an appropriate exception, or
exit()
Stack As An Array
To ensure O(1) operations → push/pop at the same end (the top index).
class ArrayStack {
int capacity, tp;
object * buf; // base of array
ArrayStack(int maxSize)
: capacity(maxSize), tp(0),
buf{new object[maxSize]}
/* Curly braces are preferred for initialization because there's
one case where parens are ambiguous:
int i(); → function declaration that returns an int
int j{}; → default-initialized variable (preferred)
int k; → uninitialized — unknown contents
int m(0); → variable m initialized to 0 (works, but parens
are ambiguous in the i() case above)
*/
{ }
};Stack As An Array: Operations
void push(object v) {
if (is_full()) error("push on full stack");
buf[tp++] = v;
}
object pop() {
if (is_empty()) error("pop on empty stack");
return buf[--tp];
}
object top() {
if (is_empty()) error("top on empty stack");
return buf[tp - 1];
}
bool is_empty() { return tp == 0; }
bool is_full() { return tp >= capacity; }- Pattern → guard the error case first, then do the normal operation
Stack As A Linked List
- For O(1) operations → only need a
headpointer- Push and pop both happen at the head → no need for a tail
- Never “full” → limited only by heap memory
class LinkedStack {
LinkNode * head;
LinkedStack() : head(nullptr) { }
bool is_empty() { return head == nullptr; }
bool is_full() { return false; }
void push(object v) {
head = new LinkNode(v, head); // new node points to old head
}
object pop() {
if (is_empty()) error("pop on empty stack");
LinkNode * old = head;
object result = old->data;
head = head->next;
delete old;
return result;
}
object top() {
if (is_empty()) error("top on empty stack");
return head->data;
}
};Stack In C++ STL
#include <iostream>
#include <stack>
using namespace std;
int main() {
stack<int> S;
for (int i = 0; i < 5; ++i)
S.push(i);
for (; !S.empty(); S.pop())
cout << S.top() << ' ';
cout << endl;
}Classic Use of Stack: Balanced Parentheses
Check whether (, [, { are properly matched and nested → push openers, pop and compare on closers.
#include <stack>
#include <string>
using namespace std;
bool balanced(const string& s) {
stack<char> S;
for (char c : s) {
if (c == '(' || c == '[' || c == '{') {
S.push(c);
} else if (c == ')' || c == ']' || c == '}') {
if (S.empty()) return false; // closer with no opener
char open = S.top(); S.pop();
if ((c == ')' && open != '(') ||
(c == ']' && open != '[') ||
(c == '}' && open != '{'))
return false; // mismatched pair
}
}
return S.empty(); // leftover openers → unbalanced
}Lecture 6: Hashing & Hash Tables
Hashing & Hash Tables Overview
- Hash function has to be O(1) to compute → really hard without collisions
- Settle for some collisions (different keys hashing to the same index) in exchange for O(1) average search
Table (a.k.a. Map, Dictionary)
- In Python, lookup by value is O(N)
- Tables connect a value with some key
- Value can be anything → e.g., address and phone number
- Key is used to find the information → e.g., person’s last name, first name
- Table implementation options:
- Search List → linked list where find is O(N) and insert is O(1) → bad since find is the most common operation
- Hash Table → in a perfect environment, find/insert/remove are all O(1), but no guarantees
- Can degenerate → need to know what causes that and how to fix it
- bad hash function (doesn’t cover full span of indicies or excessive collisions) and small enough
- Binary Search Tree → O(log N) for all operations on average
- Worst case is O(N) when the tree degenerates into a singly linked list (inserts in sorted order, no self-balancing) → balanced BSTs (AVL, Red-Black) guarantee O(log N)
- Operations: insert, find, remove
Hash Table Structure
- Contains an array of slots (each with key/value)
- A hash function computes the index for each key → spreads keys across the array
- For complexity → may divide N by the array size (capacity)
Hash Functions
- A good hash function:
- Spreads keys across the array to minimize collisions
- Covers the entire index range of the table
- Must be O(1) and cheap to compute
- What is a good distribution? → NIST handbook
- Normal? Poisson? Uniform?
- Don’t want normal → values pile up in the middle → many collisions
- Uniform is ideal → every slot has equal probability → collisions are minimized for a given load factor
- Normal? Poisson? Uniform?
Collision Resolution Policy
- Linear probing → move to the next viable slot
- When too many keys cluster together → degeneration (primary clustering)
Activities
- Activity 1 → hash signed integers
int hash(int key, int N) { return 0; }- Takes in a key and the table size N
- Return value must be in [0, N-1] inclusive
- Must ensure positive and in range
- Bitwise operations:
&,|,~(negation) → not logical operators
- Activity 2 → hash strings
int hash(string key, int N) { return 0; }
Hash Functions for Strings — Poor Choices
- Summing all ASCII codes
- Leads to a normal distribution
- May not cover the entire table range if the table is large
- Multiplying ASCII codes together
- Common factors cause collisions → mostly even values
- Neither is sensitive to character order →
"abc"and"cba"give the same result
Hash Function 1 — Shift-and-OR
int hash(string key, int N) {
const unsigned shift = 6;
const unsigned zero = 0;
unsigned mask = ~zero >> (32 - shift); // low 6 bits on
unsigned result = 0;
int len = key.size();
for (int i = 0; i < len; i++)
result = (result << shift) | (key[i] & mask);
return result % N;
}- Unsigned int gives the full 2³² range (~4 billion) all positive
- Why only the low 6 bits of each char? → For alphanumeric ASCII (
'0'–'9','A'–'Z','a'–'z'), the upper bits barely vary; the distinguishing information lives in the low 6 bits- ASCII is a 7-bit encoding → bit 7 is always 0 for standard ASCII (historically the 8th bit was used for parity / error checking)
- URL problem — which letters dominate the hash?
- Each iteration shifts
resultleft by 6 bits. After ~5–6 characters, the bits from earlier characters get shifted out of the 32-bit word - → The last ~5 characters of the string dominate the final hash value
- For URLs, the last characters are usually
.com/.org/.edu→ all URLs collide because their tails are nearly identical - (Earlier guess of “the
.comand all that” was right as the cause, but it’s the last chars that dominate, not the first)
- Each iteration shifts
Hash Function 2 — First-6 Cap (broken fix)
int hash(string key, int N) {
const unsigned shift = 6;
const unsigned zero = 0;
unsigned mask = ~zero >> (32 - shift); // low 6 bits on
unsigned result = 0;
int len = min(key.size(), 6); // cap to first 6 chars
for (int i = 0; i < len; i++)
result = (result << shift) | (key[i] & mask);
return result % N;
}- Caps the loop at 6 chars so earlier chars stay in the result
- Doesn’t fix URLs → most URLs start with
https:orwww.→ first 6 are again nearly identical → same collision problem on the other end
Fix for URLs — take the middle 6 characters
int hash(string key, int N) {
const unsigned shift = 6;
const unsigned zero = 0;
unsigned mask = ~zero >> (32 - shift); // low 6 bits on
unsigned result = 0;
int len = key.size();
int start = (len > 6) ? (len - 6) / 2 : 0; // center a 6-char window
int end = (len > 6) ? start + 6 : len;
for (int i = start; i < end; i++)
result = (result << shift) | (key[i] & mask);
return result % N;
}- Skips both the common prefix (
https://www.) and the common suffix (.com) → samples the part of the URL that actually varies (the domain name itself)
Learning C++ Bitwise Operations
print_binary()prints an unsigned int in binary → call after each iteration in the hash function to watch the hash value build up
#include <iostream>
#include <limits>
#include <bitset>
void print_binary(unsigned value) {
constexpr unsigned numBits = std::numeric_limits<unsigned>::digits;
std::bitset<numBits> binary(value);
std::cout << binary << std::endl;
}Dealing with Collisions
-
Open addressing
- Key/value pairs stored directly in array slots
- Collisions / clustering → require probing
- Deletions → mark as deleted (tombstone) so probes can still walk past to find later keys
-
Separate chaining → visualization
- Each array slot is a SearchList (linked list)
- Avoids clustering
- Never gets ‘full’
- Deletions are easy → linked list removal
- (Open addressing deletions are hard because removing a slot would break probe chains for other keys)
- Can still degenerate → if all keys hash to one slot, the chain becomes a long linked list
-
Primary clustering → clustering near the original hash value
-
Rehashing → create a larger table and rehash all entries
Probing After Collision
- Linear probing → interactive viz
hash(k, i, N) = (hash1(k) + i) mod N- Increment hash value by a constant (1) until an open slot is found
- Simplest to implement
- Leads to primary clustering
- Quadratic probing
hash(k, i, N) = (hash1(k) + c1·i + c2·i²) mod N- Leads to secondary clustering
- Double hashing
hash(k, i, N) = (hash1(k) + i·hash2(k)) mod N- Avoids clustering
Table Size Issues
- Load Factor = N (# elements) / M (# slots) → measure of how full the table is → 0.75 is high
- Table size is usually prime to avoid bias from modulo
- Too large → wasted space
- Too small → more collisions
- What happens to a chained hash table as table size → 1? → degenerates into a single singly linked list
- Record the max and min chain length when measuring chained hashing
- Up to ~20 items, linear search is fine
- → If chains can hold ~10 each, 10,000 entries only need ~1,000 slots
Time Complexity (Hash Table)
insert()→ compute hash O(1), push O(1) → O(1) averagefind()→ compute hash O(1), then O(length of chain)remove()→ compute hash O(1), then O(length of chain)
C++ Hashing — STL
- STL provides hash functions → cppreference
- STL provides unordered associative containers
#include <unordered_map>
int main() {
unordered_map<string, int> months;
months["february"] = 28;
months["april"] = 30;
months["september"] = 30;
months["december"] = 31;
cout << "september -> " << months["september"] << endl;
cout << "april -> " << months["april"] << endl;
cout << "december -> " << months["december"] << endl;
cout << "february -> " << months["february"] << endl;
}STL Example: unordered_map of Months
#include <iostream>
#include <string>
#include <unordered_map>
int main() {
std::unordered_map<std::string, int> months{
{"january", 31}, {"february", 28}, {"march", 31},
{"april", 30}, {"may", 31}, {"june", 30},
{"july", 31}, {"august", 31}, {"september", 30},
{"october", 31}, {"november", 30}, {"december", 31}};
for (auto [month, days] : months)
std::cout << month << " " << days << std::endl;
}
// In the structured binding `auto [month, days] : months`,
// month → pair::first, days → pair::second- Sample output (Klefstad’s run):
- december 31, november 30, july 31, may 31, october 31, august 31, april 30, september 30, june 30, february 28, march 31, january 31
- Order looks scrambled → that’s because it’s an
unordered_map(hash table) → no ordering guarantees - Want it ordered? → use
std::map(red-black tree) → keys come out in sorted order - This data structure is essentially an array that you can index with strings → an associative array
- Both BSTs and hash tables give good performance for this
Aside: lvalue vs rvalue
- Named after the left and right sides of an assignment statement
- lvalue → the memory cell being assigned to (has an address)
- rvalue → the value being assigned from (a temporary/expression)
Other Asides
- The words in the homework word list come from a Linux dictionary file (e.g.,
/usr/share/dict/words) → words used by spell checkers - Why only the low 6 bits per char in the hash function? → For printable ASCII (especially alphanumerics), the upper bits barely change across characters
- ASCII is a 7-bit encoding → bit 7 is always 0 for standard ASCII
- The high bits within the 7 (bits 5–6) only flip between digit/letter/case ranges, not character-to-character
- The actual distinguishing information lives in the low bits → e.g.,
'a'(0x61) and'b'(0x62) differ only in the low bits - → Discarding the upper bits loses almost no entropy and packs more characters into each 32-bit word
- 45,392 → the number of word entries in the homework word set
Homework 5: Hash Table Trade-offs
What efficiency trade-offs are we exploring?
- Collision resolution policy? → could be linear probing, quadratic probing, double hashing, or chaining
- We’re using chained hash tables in this class → already decided, not a variable
- Hash function distribution? → yes, interesting → measure several different hash functions
- A poor hash function (sum of ASCII, multiply, etc.) clusters keys into a few slots → long chains, slow finds
- A good hash function (uniform distribution) spreads keys evenly → short, balanced chains → near-O(1) finds
- We measure this by holding table size constant and swapping in different
Hasherimplementations
- Table size effect? → yes, interesting → measure several table sizes for the same hash function
- The load factor N/M drives chain length → smaller table → longer chains → slower find/remove
- Larger table → shorter chains but more wasted memory
- A prime table size avoids modulo-induced bias for non-uniform hashes
- How do we compare? → collect statistics so comparisons are meaningful
- Chain length: mean, stddev, min, max, number of empty chains
- Operation timings: insert-all (I), find-all (F), remove-all (R)
Designing a Pluggable Hashing Framework
- Sketch the hash table class
- Sketch a
Hasherclass hierarchy → abstract base + many concrete subclasses → swap in/out via polymorphism - Sketch the chain implementation with reusable static helpers
Pluggable Hasher Framework
struct Hasher {
virtual size_t hash(string key, size_t N) = 0;
// = 0 → pure virtual function
// A class with ≥ 1 pure virtual is an abstract class (cannot instantiate)
// A "concrete" class implements every pure virtual it inherits
};
// Provide 10+ concrete hashers for comparison...
struct SumHasher : public Hasher { // public inheritance → "is-a" Hasher
size_t hash(string key, size_t N) override {
// `override` is a keyword (not a reserved word) → identifies intent to
// override a base virtual. Compiler errors if no matching virtual exists.
// → NOT strictly necessary (the override happens regardless), but it's a
// safety net: catches typos in the signature that would silently create
// a brand-new function instead of overriding.
size_t ret = 0;
for (auto c : key)
ret += c;
return ret % N;
}
};HashTable Class
class HashTable {
size_t size;
ListNode ** T; // array of linked-list heads
const Hasher & hasher; // const reference → must be initialized in the
// member-initializer list (refs cannot be reseated)
public:
HashTable(const Hasher & h, size_t cap);
void insert(string key);
bool find(string key);
void remove(string key);
Stats get_statistics();
};
// Compare: STL's unordered_map<KType, VType> stores key/value pairsListNode and Static Helpers
struct ListNode {
string data; // could be std::pair<KType, VType>
ListNode * next;
static ListNode * insert(string key, ListNode * L);
static ListNode * find(string key, ListNode * L);
static ListNode * remove(string key, ListNode * L);
static void delete_list(ListNode * L);
};
// Same pattern as our unordered linked list helpers from earlierMeasured Results: STLHasher at Varying Table Sizes
All runs use 45,392 dictionary entries with the STL hash function. I = insert-all time, F = find-all time, R = remove-all time (seconds).
| Chains (M) | Load N/M | Min chain | Max chain | I (s) | F (s) | R (s) |
|---|---|---|---|---|---|---|
| 1000 | 45.4 | 21 | 64 | 0.0350 | 0.1012 | 0.1121 |
| 100 | 453.9 | 399 | 520 | 0.0342 | 0.6295 | 0.6913 |
| 10 | 4539.2 | 4469 | 4668 | 0.0340 | 5.4639 | 6.2930 |
| 1 | 45392 | 45392 | 45392 | 0.0339 | 49.38 | 60.93 |
- Insert times are flat → chained insert is O(1) per insert regardless of chain length (we prepend at head) → table size doesn’t affect it
- Find/remove scale with chain length → both must walk the chain → degrade linearly as M shrinks
- At M = 1, the hash table degenerates into a single linked list → find-all is O(N²), confirming the ~50s vs ~0.1s blow-up
- Why does the gap between min and max chain shrink as M increases? → with a good hash function, chain lengths follow roughly a Poisson distribution
- Larger M → smaller load factor → expected chain length is small → absolute spread (max − min) is small
- Smaller M → bigger expected chain length → same relative variance produces a much larger absolute spread
- A bad hash function would show big min/max gaps even at large M because keys cluster into a few slots while others stay empty
Coding the Hash Table
class HashTable {
size_t size;
ListNode ** T;
const Hasher & hasher; // size_t hash(string key, size_t N)
};Activities:
- Write the constructor →
HashTable(const Hasher & h, size_t cap) - Write
void HashTable::insert(string key); - Write
bool HashTable::find(string key); - Write
void HashTable::remove(string key);
void HashTable::insert(string key) {
size_t h = hasher.hash(key, size);
T[h] = ListNode::insert(key, T[h]);
}Perfect Hashing
- When the set of keys is known beforehand (e.g., the reserved words of C++)
- We can construct a function that guarantees no collisions → a Perfect Hash Function → wiki
- May require more than N slots in the table
- A Minimal Perfect Hash Function uses exactly N slots → wiki
- Not appropriate for a general-purpose hash table → only works when the key set is fixed and known up front
Lecture 7: Binary Trees & Binary Search Trees
Tree Traversals
Three standard ways to walk a binary tree, defined by where the root is visited relative to its subtrees.
- Pre-order → Root → Left → Right (root comes PRE/before)
- In-order → Left → Root → Right (root comes IN the middle)
- Post-order → Left → Right → Root (root comes POST/after)
External vs. internal style
- Traversals can be written as a free function taking a tree, or as a method on the tree class
- External version is usually cleaner → base case is just “is the tree null?”
- Internal version has to check each child before recursing
- Most of the time you don’t just traverse — you do something during the walk → external functions compose better with whatever real work you’re doing
Pre-order (external function)
void preorder(BinaryTree *tree){
if (tree){
cout << tree->getRootVal() << endl;
preorder(tree->getLeftChild());
preorder(tree->getRightChild());
}
}Pre-order (internal method)
void preorder(){
cout << this->key << endl;
if (this->leftChild){
this->leftChild->preorder();
}
if (this->rightChild){
this->rightChild->preorder();
}
}In-order
void inorder(BinaryTree *tree){
if (tree != NULL){
inorder(tree->getLeftChild());
cout << tree->getRootVal();
inorder(tree->getRightChild());
}
}Post-order
void postorder(BinaryTree *tree){
if (tree != NULL){
postorder(tree->getLeftChild());
postorder(tree->getRightChild());
cout << tree->getRootVal() << endl;
}
}Binary Search Tree — ADT
Operations a BST should support (Map ADT):
BinarySearchTree()→ create new empty treeput(key, val)→ insert new pair, or replace value if key already existsget(key)→ return value for key, orNULLdel(key)→ remove the key-value pairlength()→ number of pairs stored
BST Property
- For every node → keys in left subtree < node’s key < keys in right subtree
- Implementation uses two classes:
BinarySearchTree→ outer wrapper, holds a pointer to the root, handles empty-tree edge casesTreeNode→ the actual node, stores key/payload/parent/leftChild/rightChild
- Every node also tracks its parent → important for
del - Q: How many children can a node have in a BST? → at most 2
class BinarySearchTree{
private:
TreeNode *root;
int size;
public:
BinarySearchTree(){
this->root = NULL;
this->size = 0;
}
int length(){
return this->size;
}
}TreeNode class
- Optional default parameters → can construct a node with or without parent/children
- Helper methods classify the node by its position (root, leaf, left child, right child) and by which children it has
class TreeNode{
public:
int key;
string payload;
TreeNode *leftChild;
TreeNode *rightChild;
TreeNode *parent;
TreeNode(int key, string val, TreeNode *parent = NULL, TreeNode *left = NULL, TreeNode *right = NULL){
this->key = key;
this->payload = val;
this->leftChild = left;
this->rightChild = right;
this->parent = parent;
}
TreeNode *hasLeftChild(){ return this->leftChild; }
TreeNode *hasRightChild(){ return this->rightChild; }
bool isLeftChild(){ return this->parent && this->parent->leftChild == this; }
bool isRightChild(){ return this->parent && this->parent->rightChild == this; }
bool isRoot(){ return !this->parent; }
bool isLeaf(){ return !(this->rightChild || this->leftChild); }
bool hasAnyChildren(){ return this->rightChild || this->leftChild; }
bool hasBothChildren(){ return this->rightChild && this->leftChild; }
void replaceNodeData(int key, string value, TreeNode *lc = NULL, TreeNode *rc = NULL){
this->key = key;
this->payload = value;
this->leftChild = lc;
this->rightChild = rc;
if (this->hasLeftChild()){
this->leftChild->parent = this;
}
if (this->hasRightChild()){
this->rightChild->parent = this;
}
}
}Put
- If tree is empty → new node becomes the root
- Otherwise → recurse with helper
_putcomparing keys:- new key < current → go left
- new key > current → go right
- when the chosen child slot is empty → drop the new node there, set its parent to the current node
- Bug in this version → duplicate keys create a second node in the right subtree (and the duplicate is unreachable on search). Better behavior: replace old payload with new
void put(int key, string val){
if (this->root){
this->_put(key, val, this->root);
}
else{
this->root = new TreeNode(key, val);
}
this->size = this->size + 1;
}
void _put(int key, string val, TreeNode *currentNode){
if (key < currentNode->key){
if (currentNode->hasLeftChild()){
this->_put(key, val, currentNode->leftChild);
}
else{
currentNode->leftChild = new TreeNode(key, val, currentNode);
}
}
else{
if (currentNode->hasRightChild()){
this->_put(key, val, currentNode->rightChild);
}
else{
currentNode->rightChild = new TreeNode(key, val, currentNode);
}
}
}Get
- Recurse using the same left/right comparison logic as
_put _getreturns the wholeTreeNode *so callers can use it for more than just payload lookup
string get(int key){
if (this->root){
TreeNode *res = this->_get(key, this->root);
if (res){
return res->payload;
}
else{
return 0;
}
}
else{
return 0;
}
}
TreeNode *_get(int key, TreeNode *currentNode){
if (!currentNode){
return NULL;
}
else if (currentNode->key == key){
return currentNode;
}
else if (key < currentNode->key){
return this->_get(key, currentNode->leftChild);
}
else{
return this->_get(key, currentNode->rightChild);
}
}Delete
The hard one. Three cases depending on how many children the target node has.
del(key) overall flow:
- size > 1 → search with
_get, then callremoveon the found node - size == 1 and root key matches → just null out root
- otherwise → key not in tree, error
void del(int key){
if (this->size > 1){
TreeNode *nodeToRemove = this->_get(key, this->root);
if (nodeToRemove){
this->remove(nodeToRemove);
this->size = this->size - 1;
}
else{
cerr << "Error, key not in tree" << endl;
}
}
else if (this->size == 1 && this->root->key == key){
this->root = NULL;
this->size = this->size - 1;
}
else{
cerr << "Error, key not in tree" << endl;
}
}Case 1 — Node is a leaf (no children) → just null out the parent’s pointer to it
if (currentNode->isLeaf()){
if (currentNode == currentNode->parent->leftChild){
currentNode->parent->leftChild = NULL;
}
else{
currentNode->parent->rightChild = NULL;
}
}Case 2 — Node has exactly one child → promote that child into the node’s spot
- Symmetric across left/right child and parent side, so 6 sub-cases total
- If node is a left child → parent’s left now points at the grandchild
- If node is a right child → parent’s right now points at the grandchild
- If node is the root → can’t change a parent pointer, instead overwrite the node in place using
replaceNodeDatawith the child’s data
else{ // this node has one child
if (currentNode->hasLeftChild()){
if (currentNode->isLeftChild()){
currentNode->leftChild->parent = currentNode->parent;
currentNode->parent->leftChild = currentNode->leftChild;
}
else if (currentNode->isRightChild()){
currentNode->leftChild->parent = currentNode->parent;
currentNode->parent->rightChild = currentNode->leftChild;
}
else{
currentNode->replaceNodeData(currentNode->leftChild->key,
currentNode->leftChild->payload,
currentNode->leftChild->leftChild,
currentNode->leftChild->rightChild);
}
}
else{
if (currentNode->isLeftChild()){
currentNode->rightChild->parent = currentNode->parent;
currentNode->parent->leftChild = currentNode->rightChild;
}
else if (currentNode->isRightChild()){
currentNode->rightChild->parent = currentNode->parent;
currentNode->parent->rightChild = currentNode->rightChild;
}
else{
currentNode->replaceNodeData(currentNode->rightChild->key,
currentNode->rightChild->payload,
currentNode->rightChild->leftChild,
currentNode->rightChild->rightChild);
}
}
}Case 3 — Node has two children → can’t just promote one
- Find the successor = the next-largest key in the tree → guaranteed to have at most one child
- Splice the successor out of its current spot (using the easier 1- or 0-child cases above)
- Copy successor’s key/payload into the node we wanted to delete
- Use
spliceOutdirectly instead of recursing intodel→ avoids re-searching for the key
else if (currentNode->hasBothChildren()){
TreeNode *succ = currentNode->findSuccessor();
succ->spliceOut();
currentNode->key = succ->key;
currentNode->payload = succ->payload;
}Finding the successor — three sub-cases:
- Node has a right child → successor is the min of the right subtree
- Node has no right child and is a left child → successor is its parent
- Node has no right child and is a right child → walk up until you find an ancestor where you came from the left, that ancestor is the successor
findMin → just walk left children until there are no more.
TreeNode *findSuccessor(){
TreeNode *succ = NULL;
if (this->hasRightChild()){
succ = this->rightChild->findMin();
}
else{
if (this->parent){
if (this->isLeftChild()){
succ = this->parent;
}
else{
this->parent->rightChild = NULL;
succ = this->parent->findSuccessor();
this->parent->rightChild = this;
}
}
}
return succ;
}
TreeNode *findMin(){
TreeNode *current = this;
while (current->hasLeftChild()){
current = current->leftChild;
}
return current;
}
void spliceOut(){
if (this->isLeaf()){
if (this->isLeftChild()){
this->parent->leftChild = NULL;
}
else{
this->parent->rightChild = NULL;
}
}
else if (this->hasAnyChildren()){
if (this->hasLeftChild()){
if (this->isLeftChild()){
this->parent->leftChild = this->leftChild;
}
else{
this->parent->rightChild = this->rightChild;
}
this->leftChild->parent = this->parent;
}
else{
if (this->isLeftChild()){
this->parent->leftChild = this->rightChild;
}
else{
this->parent->rightChild = this->rightChild;
}
this->rightChild->parent = this->parent;
}
}
}In-order Iterator
- Iterating a BST in order should yield sorted keys → it’s basically an in-order traversal that pauses between values
- Python’s
yieldmakes this elegant → freezes function state, resumes on next call. The traversal is recursive overTreeNodeinstances, so__iter__lives on the node class - (Below is Python-style pseudocode for the iterator — C++ would use a stack or coroutine to do the same)
def __iter__(self):
if self:
if self.hasLeftChild():
for elem in self.leftChiLd:
yield elem
yield self.key
if self.hasRightChild():
for elem in self.rightChild:
yield elemSearch Tree Analysis
- Cost of
put→ proportional to tree height- Random insertion order → height ≈ log₂N
- Perfectly balanced tree → N = 2^(h+1) − 1 → height = log₂N
- Worst case (sorted insertion) → tree degenerates into a singly linked list → height = N →
putbecomes O(N)
get,in,del→ all bounded by tree height for the same reasondellooks scarier because it needs to find the successor, but successor lookup is also bounded by height → just doubles the work, constant factor, doesn’t change worst case
Conclusion → BST operations are O(log N) on average for randomly-built trees, but worst-case O(N) when the tree degenerates. This motivates self-balancing trees (next: AVL).
Lecture 8: AVL Trees
Motivation
- Plain BSTs degenerate to O(N) when keys arrive in sorted order
- An AVL tree is a self-balancing BST → keeps height ≈ log N at all times by checking balance after every insert and rotating as needed
- Named after inventors Adelson-Velskii and Landis
Balance Factor
- For every node:
balanceFactor = height(leftSubtree) − height(rightSubtree) - Valid range in an AVL tree →
−1, 0, +1 - Outside that range (
±2) → tree is out of balance, must rotate +1→ left-heavy by one0→ perfectly balanced−1→ right-heavy by one
5 (0) ← balanced, both sides equal height
/ \
(1)3 8 (-1) ← left heavy by 1, right heavy by 1
/ \
1 9
Four Rotation Cases
Look at the unbalanced node, then trace down toward the inserted/problem node. The path gives one of four shape patterns: LL, RR, LR, RL.
Rule of thumb → the middle-valued node becomes the new root.
Single rotations (same letters → straight line shape)
LL case → rotate right
z y
/ / \
y → x z
/
x
RR case → rotate left
z y
\ / \
y → z x
\
x
Double rotations (mixed letters → zigzag shape)
LR case → left-rotate the child, then right-rotate the root
z z x
/ / / \
y → x → y z
\ /
x y
RL case → right-rotate the child, then left-rotate the root
z z x
\ \ / \
y → x → z y
/ \
x y
Mnemonic
Same letters (LL, RR) → 1 rotation, opposite direction
Mixed letters (LR, RL) → 2 rotations, straighten child first
Pattern → heavy on the left? Rotate right. Heavy on the right? Rotate left. Zigzag? Can’t fix in one rotation, un-zigzag the child first so it becomes a straight line, then do the single rotation.
AVL Tree Performance
- Minimum number of nodes in an AVL tree of height h →
N(h) = 1 + N(h−1) + N(h−2) - This is the Fibonacci recurrence → as i grows,
F(i)/F(i−1) → φ(golden ratio = (1 + √5) / 2) - So
F(i) ≈ φⁱ / √5, which givesN(h) = F(h+2)/√5 − 1 - Solving for h → h ≈ 1.44 · log₂(N)
The takeaway from the derivation (don’t memorize the algebra):
- Height of an AVL tree is bounded by a constant (1.44) times log₂N
- Therefore
get,put,delare all O(log N) worst case → this is the whole point of AVL
AVL Tree — Insertion
- New keys always insert as leaves → new leaf has balance factor 0, fine on its own
- Inserting changes the parent’s balance factor:
- new node was a left child → parent’s BF goes up by 1
- new node was a right child → parent’s BF goes down by 1
- Recurse this update up toward the root. Two base cases stop the recursion:
- We reached the root
- A subtree’s BF became 0 → subtree’s height didn’t change → ancestors’ BFs are unaffected, stop
Implement AVL as a subclass of BST. _put is the same, except after creating a new leaf you call updateBalance on it.
void _put(int key, string val, TreeNode *currentNode){
if (key < currentNode->key){
if (currentNode->hasLeftChild()){
this->_put(key, val, currentNode->leftChild);
}
else{
currentNode->leftChild = new TreeNode(key, val, currentNode);
this->updateBalance(currentNode->leftChild);
}
}
else{
if (currentNode->hasRightChild()){
this->_put(key, val, currentNode->rightChild);
}
else{
currentNode->rightChild = new TreeNode(key, val, currentNode);
this->updateBalance(currentNode->rightChild);
}
}
}int updateBalance(TreeNode *node){
if (node->balanceFactor > 1 || node->balanceFactor < -1){
this->rebalance(node);
return 0;
}
if (node->parent != NULL){
if (node->isLeftChild()){
node->parent->balanceFactor += 1;
}
else if (node->isRightChild()){
node->parent->balanceFactor -= 1;
}
if (node->parent->balanceFactor != 0){
this->updateBalance(node->parent);
}
}
}updateBalance either rebalances and stops, or bumps the parent’s BF and recurses up. Once we hit BF = 0, subtree height didn’t change → done.
Left Rotation
Concrete example — right-leaning chain becomes balanced:
A(-2) B(0)
\ / \
B(-1) → A(0) C(0)
\
C(0)
Steps for left rotation (around node A, where A’s right child B becomes the new root):
- Promote the right child (B) to the subtree’s root
- Move old root (A) to be B’s left child
- If B already had a left child, that subtree becomes A’s new right child (A’s old right slot is now free since B used to live there)
Right Rotation
Concrete example — left-leaning tree becomes balanced:
E(2) C(0)
/ \ / \
C(1) F(0) → B(1) E(0)
/ \ / / \
B(1) D(0) A(0) D(0) F(0)
/
A(0)
Steps for right rotation (around node E, where E’s left child C becomes the new root):
- Promote the left child (C) to the subtree’s root
- Move old root (E) to be C’s right child
- If C already had a right child (D), that subtree becomes E’s new left child
void rotateLeft(TreeNode *rotRoot){
TreeNode *newRoot = rotRoot->rightChild;
rotRoot->rightChild = newRoot->leftChild;
if (newRoot->leftChild != NULL){
newRoot->leftChild->parent = rotRoot;
}
newRoot->parent = rotRoot->parent;
if (rotRoot->isRoot()){
this->root = newRoot;
}
else{
if (rotRoot->isLeftChild()){
rotRoot->parent->leftChild = newRoot;
}
else{
rotRoot->parent->rightChild = newRoot;
}
}
newRoot->leftChild = rotRoot;
rotRoot->parent = newRoot;
rotRoot->balanceFactor = rotRoot->balanceFactor + 1 - min(newRoot->balanceFactor, 0);
newRoot->balanceFactor = newRoot->balanceFactor + 1 + max(rotRoot->balanceFactor, 0);
}Updating Balance Factors After a Rotation
Setup for the derivation — generic left rotation around B with subtrees A, C, E (D is B’s right child):
B D
/ \ / \
A D → B E
/ \ / \
C E A C
Let h_x denote the height of subtree rooted at x. The other subtrees’ heights (h_A, h_C, h_E) don’t change during the rotation, only the BFs of B and D do.
You don’t need to recompute heights after a rotation — there’s a clean formula. The derivation (B = old root = rotRoot, D = new root = newRoot):
newBal(B) = oldBal(B) + 1 − min(0, oldBal(D))newBal(D) = oldBal(D) + 1 + max(0, newBal(B))
That’s where these two lines in rotateLeft come from:
rotRoot->balanceFactor = rotRoot->balanceFactor + 1 - min(newRoot->balanceFactor, 0);
newRoot->balanceFactor = newRoot->balanceFactor + 1 + max(rotRoot->balanceFactor, 0);Right rotation gives a symmetric formula → left as exercise.
The Zigzag Problem (When One Rotation Isn’t Enough)
Tree has BF = −2 at A, but A’s right child C is itself left-heavy (BF = +1). The shape is a zigzag, not a straight line:
A(-2)
\
C(1)
/
B(0)
A single left rotation around A doesn’t fix it — it just unbalances the other way:
C(2)
/
A(-1)
\
B(0)
Doing a right rotation back gets you exactly where you started → infinite loop.
The fix → rotation rules:
- Subtree needs a left rotation? First check the right child’s BF. If right child is left-heavy → right-rotate the right child first, then left-rotate the original.
- Subtree needs a right rotation? First check the left child’s BF. If left child is right-heavy → left-rotate the left child first, then right-rotate the original.
Translation: if the bad shape is a zigzag (LR or RL), straighten the child into a line first, then do the outer rotation.
Worked sequence — start with the zigzag, end balanced:
A(-2) A(-2) B(0)
\ \ / \
C(1) → B(-1) → A(0) C(0)
/ \
B(0) C(0)
- Right-rotate around C → tree is now A(−2) → B(−1) → C(0), a straight line
- Left-rotate around A → balanced tree B(0) with children A(0) and C(0)
void rebalance(TreeNode *node){
if (node->balanceFactor < 0){
if (node->rightChild->balanceFactor > 0){
this->rotateRight(node->rightChild);
this->rotateLeft(node);
}
else{
this->rotateLeft(node);
}
}
else if (node->balanceFactor > 0){
if (node->leftChild->balanceFactor < 0){
this->rotateLeft(node->leftChild);
this->rotateRight(node);
}
else {
this->rotateRight(node);
}
}
}Cost Summary for AVL
get→ O(log N) since tree height is boundedputcost breakdown:- Walk down to the leaf → O(log N)
- Update balance factors back up the tree → at most one update per level → O(log N)
- If a subtree is out of balance → at most 2 rotations to fix it
- Each rotation is O(1)
- Total → still O(log N)
- Deletion is also O(log N), but the textbook leaves implementation as an exercise
Map ADT — Comparison of All Implementations
| operation | Sorted Array | Hash Table | BST | AVL Tree |
|---|---|---|---|---|
| put | O(N) | O(1) | O(N) | O(log N) |
| get | O(log N) | O(1) | O(N) | O(log N) |
| in | O(log N) | O(1) | O(N) | O(log N) |
| del | O(N) | O(1) | O(N) | O(log N) |
Reading the table:
- Hash table is unbeatable on average → but no order, worst case can be O(N) on bad hashes
- Sorted array is fast for lookup but slow for insertion/deletion (shifting)
- Plain BST is O(N) worst case → only good if you trust the input distribution
- AVL gives guaranteed O(log N) on every operation → the safe choice when you also want ordered iteration
Lecture 9: BST Implementation Deep Dive & AVL Code
Binary Search Tree — Recap
- A type of table/dictionary (like a hash table) → store a
valuein a node associated with akey - Each node has up to two child nodes → one left child, one right child
- BST ordering invariant:
- All left descendants have smaller key values
- All right descendants have larger key values
- Leaf node → node with no children
- Height of tree → longest path from root to leaf
Example tree:
4
/ \
1 6
/ \
5 7
Search Algorithm
- Start at the root
- If the value equals the current node → found
- If the value is less than the current node → move to its left child
- If the value is greater → move to its right child
- Repeat until either we find the node or we reach the bottom of the tree (
nullptr) - If we reach the bottom → tree doesn’t contain the value
Walking through “search for 5” on the tree above:
-
Start at root →
4 -
5 > 4→ look at right child →6 -
5 < 6→ look at left child →5 -
Found it!
-
As soon as you put “search” in binary search tree, every key must follow the convention → left is smaller, right is larger
Tree Node Implementation
template <typename KeyType, typename ValueType>
struct TreeNode {
KeyType key;
ValueType value;
TreeNode * left;
TreeNode * right;
TreeNode(KeyType new_key, ValueType new_value,
TreeNode * l, TreeNode * r);
// Static helpers
static TreeNode * insert(KeyType key, ValueType value, TreeNode * t);
static TreeNode * find(KeyType key, TreeNode * t);
static TreeNode * remove(KeyType key, TreeNode * t);
static void print(ostream & out, TreeNode * t);
static void delete_tree(TreeNode * t);
};Inserting a Node
- Find where to place the new node → use the same algorithm as search
- Two possible outcomes:
- Key is already in the tree → simply replace old value with new
- Walk falls off the tree (key not present) → attach a new leaf
- If key is less than parent → add to left side
- If key is greater than parent → add to right side
Iterative TreeNode::insert
TreeNode * insert(TreeNode * root, KeyType key, ValueType value) {
if (root == nullptr)
return new TreeNode(key, value, nullptr, nullptr); // empty base case
TreeNode * t = root;
while (t->key != key) {
if (key < t->key) {
if (t->left == nullptr)
t->left = new TreeNode(key, value, nullptr, nullptr);
t = t->left;
}
else if (key > t->key) {
if (t->right == nullptr)
t->right = new TreeNode(key, value, nullptr, nullptr);
t = t->right;
}
}
t->value = value; // overwrite if key already existed
return root;
}Recursive TreeNode::insert
TreeNode * insert(KeyType key, ValueType value, TreeNode * t) {
if (t == nullptr)
return new TreeNode(key, value, nullptr, nullptr);
if (key < t->key)
t->left = insert(key, value, t->left);
else if (key > t->key)
t->right = insert(key, value, t->right);
else
t->value = value; // duplicate key → overwrite
return t;
}- Test note → know how to write
insert,find, andremove, and what can go wrong with each - AVL trees → we’ll get the code for the homework
TreeNode::find
static TreeNode * find(KeyType key, TreeNode * t) {
if (t == nullptr) return nullptr;
if (key < t->key) return find(key, t->left);
if (key > t->key) return find(key, t->right);
return t; // key == t->key
}Removing a Node — 3 Cases
- Leaf node → just remove the node
- Single child → replace the node with its child
- Two children → swap key/value with the in-order successor, then recursively remove that successor (which now has at most one child)
- In-order successor → the leftmost node of the right subtree (smallest key larger than the one being deleted)
- Equivalent alternative → the rightmost node of the left subtree (in-order predecessor) — either works
TreeNode::remove
TreeNode * delete_node(TreeNode * t, KeyType key) {
if (!t) return t;
if (key < t->key)
t->left = delete_node(t->left, key);
else if (key > t->key)
t->right = delete_node(t->right, key);
else { // found the node to delete
// Case 1 & 2: zero or one child
if (t->left == nullptr || t->right == nullptr) {
TreeNode * child = t->left ? t->left : t->right;
if (child == nullptr) { // no child
child = t;
t = nullptr;
} else { // one child
*t = *child; // copy data up from child
}
delete child;
}
// Case 3: two children → swap with in-order successor, then recurse
else {
TreeNode * succ = find_leftmost(t->right);
swap(t->key, succ->key);
swap(t->value, succ->value);
t->right = delete_node(t->right, key);
}
}
return t;
}
TreeNode * find_leftmost(TreeNode * t) {
while (t->left)
t = t->left;
return t;
}TreeNode::print (in-order traversal → keys in sorted order)
void print(ostream & out, TreeNode * t) {
if (t == nullptr) return;
print(out, t->left);
out << t->key << " → " << t->value << "\n";
print(out, t->right);
}TreeNode::delete_tree (post-order → free children before parent)
void delete_tree(TreeNode * t) {
if (t == nullptr) return;
delete_tree(t->left);
delete_tree(t->right);
delete t;
}Binary Search Tree Class
template <typename KeyType, typename ValueType>
class BinarySearchTree {
TreeNode * root;
public:
void insert(KeyType key, ValueType value) {
root = TreeNode::insert(key, value, root);
}
ValueType find(KeyType key) {
TreeNode * t = TreeNode::find(key, root);
if (t == nullptr) {
insert(key, ValueType()); // default-construct on miss
t = TreeNode::find(key, root);
}
return t->value;
}
void remove(KeyType key) {
root = TreeNode::remove(key, root);
}
void print(ostream & out) {
TreeNode::print(out, root);
}
};Time Complexity
insert,find,remove→ all O(h) where h = height of tree- O(h) is NOT an acceptable final answer → must be a function of N (number of keys)
- Roughly balanced tree → h = O(log N)
- Unbalanced tree → h = O(N)
- Worst case → inserting keys in (nearly) ascending or descending order → degenerates into a linked list
- Self-balancing trees (AVL) prevent this degeneration
Tree Traversals
In-order → visits all nodes in ascending sorted order USE → sorting by keys
def in-order(t):
if t != nullptr:
in-order(t->left) # 1
visit(t->key, t->value) # 2
in-order(t->right) # 3
- What if you swap steps 1 and 3? → visits in descending order
Pre-order → prefix order USE → allows rebuilding the same tree (serialize/deserialize)
def pre-order(t):
if t != nullptr:
visit(t->key, t->value)
pre-order(t->left)
pre-order(t->right)
Post-order → postfix order
USE → deleting nodes of a tree, evaluating expression trees
e.g., (3·5) - (4/2) evaluated post-order
def post-order(t):
if t != nullptr:
post-order(t->left)
post-order(t->right)
visit(t->key, t->value)
Tree Min / Max
Minimum → leftmost node
while (t->left != nullptr)
t = t->left;
return t;
Maximum → rightmost node
while (t->right != nullptr)
t = t->right;
return t;
Time complexity → O(h) where h is height of tree
When Is Recursion Appropriate?
- T(N) = N² → no → stack will explode
- T(N) = N → if N gets large it will blow the stack
- T(N) = lg(N) → yes → 2³³ is ~8 billion, so 33 stack frames is nothing to worry about
AVL Self-Balancing Trees
- Order-preserving rotations can keep the tree balanced
- After every insert/remove, walk back up and rebalance → guarantees O(log N)
AVL tree resources:
- Animation of building and removing → LINK
- Detailed example building AVL Tree → LINK
- Detailed explanation → LINK
- Tool for experimentation → LINK
- Python explanation → LINK
- Explanation of balance factors → LINK
AVL Rebalance — Pseudo-code (ChatGPT version the prof shared)
function adjust(node):
if node is null:
return
if node.left is not null and node.right is not null:
if node.left.height - node.right.height > 1:
if node.left.left.height >= node.left.right.height:
rotate_right(node)
else:
rotate_left_right(node)
elif node.right.height - node.left.height > 1:
if node.right.right.height >= node.right.left.height:
rotate_left(node)
else:
rotate_right_left(node)
else if node.left is not null:
if node.left.height > 1:
if node.left.left.height >= node.left.right.height:
rotate_right(node)
else:
rotate_left_right(node)
else if node.right is not null:
if node.right.height > 1:
if node.right.right.height >= node.right.left.height:
rotate_left(node)
else:
rotate_right_left(node)
node.height = max(get_height(node.left), get_height(node.right)) + 1AVL Rebalance — C++
int get_height(Node * node) { return node ? node->height : 0; }
int get_balance(Node * node) {
return node ? get_height(node->left) - get_height(node->right) : 0;
}
int set_height(Node * node) {
return node->height = 1 + max(get_height(node->left), get_height(node->right));
}
static Node * rebalance(Node * t) { // called by insert() and remove()
set_height(t);
int balance = get_balance(t);
if (balance > 1) { // left-heavy
if (get_balance(t->left) < 0)
t->left = left_rotate(t->left); // LR case
return right_rotate(t); // LL case
} else if (balance < -1) { // right-heavy
if (get_balance(t->right) > 0)
t->right = right_rotate(t->right); // RL case
return left_rotate(t); // RR case
}
return t;
}AVL Rotations
Node * left_rotate(Node * x) {
Node * y = x->right;
Node * T2 = y->left;
y->left = x; // perform rotation
x->right = T2;
set_height(x); // update heights (x first — it's now lower)
set_height(y);
return y; // new subtree root
}
Node * right_rotate(Node * y) {
Node * x = y->left;
Node * T2 = x->right;
x->right = y; // perform rotation
y->left = T2;
set_height(y); // update heights (y first — it's now lower)
set_height(x);
return x; // new subtree root
}T(N) for Recursive Functions
- Master Method for solving recurrence relations
- Recursive T(N) → LINK
Hint — Coding a C++ Template
- Fully code/test with a specialized type first → e.g.,
BinarySearchTreewithstringkey,intvalue - Then name type aliases with
using:using KeyType = string; using ValueType = int; class BinarySearchTree { KeyType key; // use KeyType / ValueType throughout the class ValueType value; public: // ... };
From Using to Template
- Once it works with the aliases, swap them for a template header and test with
BinarySearchTree<string, int>:template <typename KeyType, typename ValueType> class BinarySearchTree { KeyType key; ValueType value; public: // ... }; - After you verify it still works with
<string, int>, try it with new types → e.g.,BinarySearchTree<int, string>
Lecture 10: Sorting
Sorting Overview
- Sorting → rearrange a sequence so the keys obey some ordering (usually ascending)
- Why we care → sorted data unlocks O(log N) binary search, makes duplicate/range queries cheap, and is a building block for tons of other algorithms (merge joins, sweep-line, etc.)
- Two big families:
- Comparison-based sorts → compare keys pairwise → best possible is O(N · log N) (proven lower bound)
- Non-comparison sorts → use key structure (digits, buckets) → can hit O(N), but not general purpose (counting sort, radix sort)
- Key properties to track for every sort:
- Time complexity → best / average / worst → matters because some sorts have horrible worst cases on adversarial inputs (quick sort on sorted input with bad pivot)
- Space complexity → in-place (O(1) or O(log N) for recursion stack) vs. out-of-place (O(N) extra)
- Stable → equal keys keep their original relative order → matters when sorting by one field but wanting the secondary order preserved
- Adaptive → runs faster on nearly-sorted input (insertion sort is the poster child)
Big-O Reference Table
| Sort | Best | Average | Worst | Space | Stable? | Notes |
|---|---|---|---|---|---|---|
| Bubble | O(N) | O(N²) | O(N²) | O(1) | Yes | Pedagogical only |
| Selection | O(N²) | O(N²) | O(N²) | O(1) | No | Fewest swaps (N−1 of them) |
| Insertion | O(N) | O(N²) | O(N²) | O(1) | Yes | Great on small / nearly-sorted inputs |
| Shell | O(N · log N) | ~O(N^1.25) | O(N²) | O(1) | No | Depends on gap sequence |
| Merge | O(N · log N) | O(N · log N) | O(N · log N) | O(N) | Yes | Guaranteed O(N · log N), extra memory |
| Quick | O(N · log N) | O(N · log N) | O(N²) | O(log N) | No | In-place, fast in practice, bad pivots → degenerates |
Bubble Sort
- Idea → repeatedly walk the array, swap adjacent out-of-order pairs → largest value “bubbles” to the end each pass
- After pass k → last k elements are in their final position
- Optimization → if a full pass makes zero swaps, the array is sorted → exit early → gives the O(N) best case on already-sorted input
- One pass on
[5, 1, 4, 2, 8]:
[5, 1, 4, 2, 8] → swap 5,1 → [1, 5, 4, 2, 8]
[1, 5, 4, 2, 8] → swap 5,4 → [1, 4, 5, 2, 8]
[1, 4, 5, 2, 8] → swap 5,2 → [1, 4, 2, 5, 8]
[1, 4, 2, 5, 8] → no swap → [1, 4, 2, 5, 8] ← 8 is in place
- O(N²) average and worst → makes ~N²/2 comparisons and up to N²/2 swaps → swap-heavy compared to selection sort
- Stable → only swaps adjacent elements, never jumps equal keys past each other
- Real-world use → basically none. Lives in textbooks because it’s the easiest sort to explain and analyze
Selection Sort
- Idea → improves on bubble sort by making only one exchange per pass
- Walk the unsorted part, track the index of the max (or min) element, swap it into the boundary position at the end of the pass → one swap per step
- After step k → the last k positions hold the k largest elements in sorted order
- One step on
[5, 1, 4, 2, 8](selecting max into the end):
[5, 1, 4, 2, 8] scan → max is 8 at index 4
swap with position 4 (no-op here)
[5, 1, 4, 2 | 8] ← 8 locked in
next step scans [5, 1, 4, 2] → max is 5 at index 0
swap with position 3
[2, 1, 4 | 5, 8]
- O(N²) always → no early-exit trick → unlike bubble/insertion, selection sort doesn’t get faster on sorted input → it still scans every unsorted element to find the max
- Not stable → the long-distance swap can jump an equal key past another → e.g.,
[2a, 2b, 1]→ swap min1with position 0 →[1, 2b, 2a](original order flipped) - O(1) extra space, exactly N − 1 swaps → minimizes write cost → useful when writes are expensive (flash memory, EEPROM) and the array is small
- vs. bubble sort → same time complexity, far fewer swaps, but loses stability and the best-case bonus
Insertion Sort
- Idea → grow a sorted prefix one element at a time → take the next unsorted element, slide it left past anything larger until it sits in the right spot
- How a human sorts a hand of playing cards
- After step k → first k+1 elements are sorted relative to each other (not yet in final position)
- One step on
[3, 7, 1, 5](inserting1):
[3, 7 | 1, 5] ← sorted prefix [3, 7], next element is 1
[3, 7, _, 5] take 1 out
[3, _, 7, 5] 7 > 1 → shift right
[_, 3, 7, 5] 3 > 1 → shift right
[1, 3, 7, 5] drop 1 at the front
- O(N) best case → already-sorted input → every new element triggers one comparison and zero shifts → why insertion sort is “adaptive”
- O(N²) average and worst → reverse-sorted input → every new element shifts past everything to its left
- Stable → only shifts elements one slot at a time, never jumps equals
- O(1) extra space, in place
- Where it actually wins:
- Small arrays (typically N < ~16) → low constant factor beats merge / quick sort → many real
std::sortimplementations switch to insertion sort for small subarrays inside quicksort - Nearly-sorted data → linear in the number of inversions → faster than O(N · log N) sorts in practice
- Streaming → can sort incrementally as new items arrive
- Small arrays (typically N < ~16) → low constant factor beats merge / quick sort → many real
void insertion_sort(vector<int>& a) {
for (int i = 1; i < (int)a.size(); i++) {
int key = a[i];
int j = i - 1;
while (j >= 0 && a[j] > key) { // slide larger elements right
a[j + 1] = a[j];
j--;
}
a[j + 1] = key;
}
}Shell Sort
- Idea → insertion sort generalized → instead of comparing adjacent elements (gap = 1), compare elements that are
gapapart, then shrink the gap → finish with a regular insertion sort (gap = 1) - Why it works → large gaps let out-of-place elements travel far in few moves → by the time gap = 1, the array is “almost sorted,” and insertion sort eats that case in near-linear time
- Gap sequence matters a lot → it’s the whole game:
- Shell’s original → N/2, N/4, …, 1 → O(N²) worst case
- Hibbard → 1, 3, 7, 15, … (2ᵏ − 1) → O(N^1.5) worst case
- Sedgewick → mixed sequence → ~O(N^1.33) average
- The “between O(N) and O(N²)” the prof mentioned → no closed-form average for a generic gap sequence
- Not stable → long-distance swaps inside each gap-pass can flip equal keys
- In-place → O(1) extra space
- Great when you need an in-place sort that’s faster than O(N²) but want to avoid recursion (embedded systems, very memory-tight code)
void shell_sort(vector<int>& a) {
int n = a.size();
for (int gap = n / 2; gap > 0; gap /= 2) { // halving gap
for (int i = gap; i < n; i++) {
int key = a[i];
int j = i;
while (j >= gap && a[j - gap] > key) { // gapped insertion sort
a[j] = a[j - gap];
j -= gap;
}
a[j] = key;
}
}
}Merge Sort
- Idea → classic divide-and-conquer:
- Split the array in half
- Recursively sort each half
- Merge the two sorted halves into one sorted array
- Base case → array of size 0 or 1 is already sorted
- Recursion tree on
[5, 2, 4, 7, 1, 3, 2, 6]:
[5, 2, 4, 7, 1, 3, 2, 6]
/ \
[5, 2, 4, 7] [1, 3, 2, 6]
/ \ / \
[5, 2] [4, 7] [1, 3] [2, 6]
/ \ / \ / \ / \
[5][2] [4][7] [1][3] [2][6]
\ / \ / \ / \ /
[2,5] [4,7] [1,3] [2,6]
\ / \ /
[2, 4, 5, 7] [1, 2, 3, 6]
\ /
[1, 2, 2, 3, 4, 5, 6, 7]
- log₂N levels of recursion → O(N) work merging at each level → O(N · log N) for all cases (best, average, worst)
- Merge step → walk two sorted lists with two pointers → take whichever head is smaller → O(N) per merge
- Stable → as long as the merge favors the left list on ties → equal keys keep their original relative order
- O(N) extra space → needs a scratch buffer for the merge → main downside vs. quick sort
- When to prefer it:
- Need a guaranteed O(N · log N) → no degenerate worst case like quick sort
- Sorting linked lists → merge sort works without random access and without extra memory (just rewire pointers)
- External sorting / sorting data too big for RAM → merging is naturally streaming
void merge(vector<int>& a, int lo, int mid, int hi) {
vector<int> buf(hi - lo);
int i = lo, j = mid, k = 0;
while (i < mid && j < hi)
buf[k++] = (a[i] <= a[j]) ? a[i++] : a[j++]; // <= keeps it stable
while (i < mid) buf[k++] = a[i++];
while (j < hi) buf[k++] = a[j++];
for (int x = 0; x < (int)buf.size(); x++)
a[lo + x] = buf[x];
}
void merge_sort(vector<int>& a, int lo, int hi) {
if (hi - lo <= 1) return; // base case
int mid = lo + (hi - lo) / 2;
merge_sort(a, lo, mid);
merge_sort(a, mid, hi);
merge(a, lo, mid, hi);
}Quick Sort
- Idea → divide-and-conquer like merge sort, but the work happens before the recursion, not after:
- Pick a pivot element
- Partition → rearrange the array so everything < pivot is on the left, everything > pivot is on the right
- Recursively quick sort each side
- The pivot is in its final sorted position after partitioning → no merge step needed → that’s the “merge sort without extra memory” insight
- O(N) partition × log N average recursion depth → O(N · log N) average
- Degeneration → if every pivot is the smallest (or largest) element, partition splits N into (0, N−1) → recursion depth becomes N → O(N²) worst case
- Classic trigger → already-sorted input + “always pick first element as pivot” → every partition is maximally lopsided
- Pivot strategies (each one is a fix for the previous degeneration):
- First / last element → fast, but O(N²) on sorted input
- Random pivot → expected O(N · log N), no adversarial input can force the worst case
- Median-of-three → take the median of
a[lo], a[mid], a[hi]→ cheap to compute, kills the sorted-input degeneration → what most production sorts use
- O(log N) extra space → recursion stack only (no scratch buffer) → in-place modulo the stack
- Not stable → the partition step swaps long distances → equal keys can swap past each other
- Why quick sort tends to beat merge sort in practice even though both are O(N · log N):
- In-place → better cache behavior, no allocation
- Tight inner loop → small constant factor on modern CPUs
- Real-world →
std::sortis typically introsort → quick sort with a depth limit; when recursion gets too deep, it bails out to heap sort to guarantee O(N · log N), and switches to insertion sort for small subarrays
int partition(vector<int>& a, int lo, int hi) { // Lomuto partition
int pivot = a[hi - 1]; // last element as pivot
int i = lo;
for (int j = lo; j < hi - 1; j++) {
if (a[j] < pivot)
swap(a[i++], a[j]);
}
swap(a[i], a[hi - 1]); // pivot to its final spot
return i;
}
void quick_sort(vector<int>& a, int lo, int hi) {
if (hi - lo <= 1) return;
int p = partition(a, lo, hi);
quick_sort(a, lo, p);
quick_sort(a, p + 1, hi);
}Summary
- Use insertion sort → small or nearly-sorted arrays
- Use merge sort → need guaranteed O(N · log N), or sorting linked lists / external data
- Use quick sort (or introsort) → general-purpose in-memory sorting, especially for primitives where stability doesn’t matter
- Bubble / selection / shell → mostly historical, with selection sort hanging on for write-expensive memory and shell sort for tiny embedded code
- Big lesson → time complexity isn’t the whole story → stability, in-place-ness, adaptiveness, and constant factors decide which sort to actually reach for
Lecture 11: Sorting (In-Lecture Deep Dive) & Heap Sort
Sorting Recap
- Sorting → putting items in order (e.g. ascending)
- Simplest sorts are slow → O(N²)
- Insertion sort → insert each element at the right spot in a growing sorted prefix
- Bubble sort → bubble the largest value up to the end each pass
- Selection sort → scan for the min/max, swap it into place
- Merge sort → classic example of recursion → O(N · log N)
- Trade-off → uses O(N) extra memory for the merge buffer
void merge_sort(string a[], int left, int right) {
int mid = (left + right) / 2;
if (left < right) {
merge_sort(a, left, mid);
merge_sort(a, mid + 1, right);
// include the midpoint in the left subpartition — the right starts at mid+1
merge(a, left, mid, right); // requires extra array for the merge
}
}Ideal Sort Algorithm Properties (NO SUCH SORT EXISTS)
- Stable → equal keys aren’t reordered
- In place → O(1) extra space
- Worst-case O(N · log N) key comparisons
- Worst-case O(N) swaps
- Adaptive → faster when data is nearly sorted or has few unique keys
- No single algorithm has all of these → “best” sort depends on application
Two “Good” Sorts to Study
- Good sorting algorithms are more complex than the naïve ones
- We focus on quick sort and heap sort
- Both are roughly in place → O(log N) extra memory (recursion stack for quicksort, none for heapsort)
- Both run O(N · log N) on average
- Animations → http://www.sorting-algorithms.com/
Quick Sort
- Complexity → O(N · log N) average, O(N²) worst case
- Worst case is exponentially unlikely with a little effort (good pivot selection)
- Uses O(log N) extra space (recursion stack)
- In practice → the fastest general-purpose sort
- Animation → https://www.youtube.com/watch?v=vxENKlcs2Tw
- Algorithm
- Pick a value in the partition called the pivot
- The pivot is the only element put in its final correct spot per call
- Middle is best case → the edges are worst case
- Same intuition as binary search being bad when the target sits at an edge → unbalanced split
- Choosing the wrong pivot wrecks the runtime → the original implementation picked the last item, which is why nearly-sorted input FUCKED it
- A better pivot is roughly the middle of the range of values
- Picking log N pivots and moving them is O(N) → still cheap
- Next iteration → use a random number generator for the pivot (works well) → but there’s something even better (median-of-three, below)
- Partition the range
- Values less than pivot go on one side
- Values greater than pivot go on the other
- Recursively sort both the lower and higher partitions
- Pick a value in the partition called the pivot
void quicksort(string A[], int low, int high) {
if (low < high) {
int pivot_index = partition(A, low, high);
// partition puts the pivot where it would be if the array were sorted
quicksort(A, low, pivot_index - 1);
quicksort(A, pivot_index + 1, high);
}
}- Classic divide-and-conquer → quicksort sorted 2,000,000,000 integers in 20 minutes
Partitioning
- Move values less than pivot to one side (https://www.youtube.com/watch?v=ZHVk2blR45Q)
- Move values greater than pivot to the other side
- Returns the index where the pivot ends up after partitioning
int partition(string A[], int low, int high) {
string pivot = select_pivot(A, low, high);
int below = low, above = high - 1;
for (;;) {
while (A[below] < pivot) { ++below; }
while (pivot < A[above]) { --above; }
if (below < above) // two in wrong partition
swap(A[below++], A[above--]);
else break;
}
swap(A[below], A[high]); // restore pivot
return below;
}Three-Way Partition (What It Actually Means)
- A true three-way partition splits the array into three regions instead of two:
< pivot|== pivot|> pivot
- AKA the Dutch National Flag partition (Dijkstra)
- Why it’s “best in practice” → when the input has many duplicate keys, all equal-to-pivot elements get placed in their final spot in a single pass and are never recursed on
- Standard 2-way partition keeps shuffling equal keys around across recursive calls → wasted work
- Used by Sedgewick / Bentley-McIlroy quicksort (the basis for many stdlib
sortimplementations) - Sketch:
// Dutch National Flag — three regions: <pivot, ==pivot, >pivot
void quicksort_3way(vector<int>& a, int lo, int hi) {
if (hi <= lo) return;
int lt = lo, gt = hi;
int pivot = a[lo];
int i = lo + 1;
while (i <= gt) {
if (a[i] < pivot) swap(a[lt++], a[i++]);
else if (a[i] > pivot) swap(a[i], a[gt--]);
else i++; // equal to pivot → leave in place
}
quicksort_3way(a, lo, lt - 1);
quicksort_3way(a, gt + 1, hi);
}Original Select Pivot
- Choosing the pivot is critical to performance
- Algorithm assumes pivot value sits in
A[high]
string select_pivot(string A[], int low, int high) {
return A[high];
}- Original picks the last value → what could go wrong?
- If the input is partially sorted, the pivot ends up near one end → partitions are wildly unequal → O(N²)
Improved Select Pivot
- Ideal pivot → median of the entire partition → but computing that is O(N) (too expensive)
- Could pick a random index between
lowandhigh→ works well, breaks adversarial inputs - Better choice → median-of-three → O(1)
- Look at the first, last, and middle values
- Use the median of those three as the pivot
- Yields equal partitions for pre-sorted lists
string median_of_three(string A[], int low, int high) {
int mid = (low + high) / 2;
if (A[mid] < A[low]) swap(A[low], A[mid]);
if (A[high] < A[low]) swap(A[low], A[high]);
if (A[mid] < A[high]) swap(A[mid], A[high]);
// The median value is now sitting in A[high], so the existing
// partition() code works unchanged — and won't degenerate on sorted input
return A[high];
}Can You Defeat Median-of-Three?
- Yes → you can construct adversarial inputs where median-of-three still picks bad pivots
- Small example →
[1, 4, 2, 5, 3]A[low] = 1,A[mid] = 2,A[high] = 3→ sorted: 1, 2, 3 → median is 2- After the median-of-three swaps, pivot = 2 ends up in
A[high] - 2 is the second-smallest value in the whole array → partition yields
[1]on the left and[4, 3, 5]on the right → already badly unbalanced
- General trick → arrange the array so the median of
{first, middle, last}is always near the min or max of the partition → keeps recursing on near-full subarrays - McIlroy’s “A Killer Adversary for Quicksort” (1999) builds these inputs adaptively by watching what the sort does → can force O(N²) on essentially any deterministic median-of-three quicksort
- Real-world fix → introsort (below) → falls back to heapsort if recursion gets too deep, guaranteeing O(N · log N)
Group Discussion: Quick Sort on Small Arrays
- Quick sort doesn’t perform well on small arrays → insertion sort beats it
- Why does it perform poorly on small arrays?
- What can we do to improve its performance?
Small Arrays
- Quick sort underperforms on small arrays → the overhead of recursion and partitioning swamps the actual sorting work
- Insertion sort wins on small slices because it has tiny constants and is cache-friendly
- Hybrid algorithm
- For slices larger than K → use quick sort
- For smaller slices → use insertion sort
- K is usually between 10 and 16
Hybrid Quick Sort
void quicksort(string A[], int low, int high) {
if (high - low < K) { // constexpr int K = 13;
insertionsort(A, low, high);
} else {
string pivot = median_of_three(A, low, high);
int i = partition(A, low, high, pivot);
quicksort(A, low, i - 1);
quicksort(A, i + 1, high);
}
}Introspective Sort (IntroSort) → combines 3 sorts
- Switches from quicksort to heapsort if recursion depth gets too deep → guards against O(N²) worst case
- Uses median-of-three pivot selection
- Switches to insertion sort for slices smaller than 16 (10–15 is the sweet spot)
- The June 2000 SGI C++ STL
stl_algo.hunstable sort uses Musser’s introsort approach - Big idea → identify the worst cases of one sort and switch to a different one before they bite
void introsort_util(vector<string>& arr, int low, int high, int depth_limit) {
if (high - low < K) { // K = 13
insertion_sort(arr, low, high);
return;
}
if (depth_limit == 0) {
heapsort(arr, low, high); // fallback when recursion is too deep
return;
}
// quicksort branch
int p = partition(arr, low, high);
introsort_util(arr, low, p - 1, depth_limit - 1);
introsort_util(arr, p + 1, high, depth_limit - 1);
}
void introsort(vector<string>& arr, int low, int high) {
int depth_limit = 2 * log(high - low);
introsort_util(arr, low, high, depth_limit);
}Heap Sort
Binary Heap
- Heap property → each node’s key is ≥ its children’s keys
- Max-heaps use ≥, min-heaps use ≤
- A complete binary tree has every level full
- Except the lowest level, which fills from left to right
- Doesn’t need to be stored as an actual tree structure → an array works fine
- A binary heap = complete binary tree + heap property
- Common uses → priority queue, Dijkstra’s SSSP, Prim’s MST
- Complete binary trees can be stored in a flat array → index 0 is the root:
int left_child(int i) { return 2 * i + 1; }
int right_child(int i) { return 2 * i + 2; }
int parent(int i) { return (i - 1) / 2; }Binary Heap Operation: Heapify-Up
- AKA Sift-Up / Bubble-Up → O(log N)
- Used after inserting a new element at the last array slot of the heap
- Move the new element toward the root, swapping with its parent while the parent is smaller (for a max-heap)
- Stops when the element is in its correct spot, or reaches the root
- Useful for priority queue inserts
- Visualization → https://www.youtube.com/watch?v=Q1yi1eaqN7I
- The sorted output gets built below the binary heap (in the same array)
Binary Heap Operation: Heapify-Down
- AKA Sift-Down / Trickle-Down
- Used after deleting the root → the last element in the heap is moved to the root position
- Compare the element with its children
- If it’s smaller than either child, swap it with the larger child (for a max-heap)
- Repeats until the element is in place, or both children are smaller
- Useful for heap sort
Heap Sort: Concept
- Useful for priority queue
- Idea → 2 · N · log N work total → heap sort makes 2 passes but never gets worse than O(N · log N) (unlike quicksort’s O(N²) worst case)
- Algorithm
- Convert unsorted array to a binary heap of N values → O(N) amortized (the N/2 internal nodes × log N is actually a tighter bound that sums to O(N))
- Heapify to bring the largest value to the root
- Swap heap root with the slot just past the end of the heap → that slot becomes the top of the sorted region
- Decrease heap size by one
- Continue until only 1 item is left in the heap
- Complexity → O(N · log N)
- But slower than quicksort in practice (cache-unfriendly access pattern)
- HeapSort → 45 minutes to sort 1,000,000,000 integers
- Quicksort → 20 minutes to sort 2,000,000,000 integers
- Half as many items took twice as long to sort → quicksort wins on constant factors
- References
- Example video → https://www.youtube.com/watch?v=2DmK_H7IdTo
- GeeksforGeeks → https://www.geeksforgeeks.org/dsa/heap-sort/
- Wikipedia → https://en.wikipedia.org/wiki/Heapsort
Heapify (Down)
void heapify(vector<string>& vec, int size, int root) { // O(log N)
int largest = root;
int left = 2 * root + 1;
int right = 2 * root + 2;
// If left child is larger than root
if (left < size && vec[left] > vec[largest]) largest = left;
// If right child is larger than largest so far
if (right < size && vec[right] > vec[largest]) largest = right;
// If largest is not root, swap and recurse down the affected subtree
if (largest != root) {
swap(vec[root], vec[largest]);
heapify(vec, size, largest); // only follow one path — the larger child
}
}Heap Sort
void heapSort(std::vector<std::string>& vec) {
int size = vec.size();
// Build max heap (rearrange so the largest is at the root)
for (int root = size / 2 - 1; root >= 0; --root) // ~N/2 calls
heapify(vec, size, root); // O(log N) each
// Extract elements from the heap one by one
for (int end = size - 1; end > 0; --end) { // ~N iterations
swap(vec[0], vec[end]); // move max to end
heapify(vec, end, 0); // re-heapify the shrunk heap, O(log N)
}
}Soft Summaries (Same Length, One Line Each)
- Terms → top array = sorted region, bottom array = unsorted region; first/last = ends of the unsorted region; min/max = smallest/largest key
- Bubble sort → walks the bottom array, bubbling the max up to the last position of the sorted top
- Literally just moves the largest one to the top, then the next pass works on the remaining N−1
- Insertion sort → takes the first element of the bottom array, inserts it into the sorted top → like
SortedArrayList::insert()- Find where it belongs, shift everything down/up, then drop it in
- Selection sort → scans the bottom array for the min, swaps it into the next slot of the sorted top
- Difference vs. insertion sort → selection sort searches the unsorted side for the right element (one swap per pass, fixed-cost scan), while insertion sort takes whatever comes next and searches the sorted side for where to put it (lots of shifting, but adaptive — already-sorted runs cost ~nothing)
- Heap sort → extracts the max from the root of a max-heap, swaps it to the top of the sorted region (built below the heap in the same array)
- Merge sort → divides array in half, sorts each half recursively, then interleave-merges them into a sorted list
- Quick sort → picks a pivot, places it in its final sorted position, then recursively sorts the sub-arrays before and after it
Lecture 12: Graphs (Intro & Traversal)
Graphs
- G = (V, E)
- V → vertices (or nodes); notation
v ∈ V - E → edges, each connects a pair of vertices
- E ⊆ V × V;
(u, v) ∈ E
- E ⊆ V × V;
Example Applications
- Airport system
- airports are vertices, flights are edges
- “best path” may mean shortest flight time or least expensive
- Traffic flow
- intersection is a vertex, roads are edges
- best path could be shortest distance or fastest time
- Computer network (cable / wire)
Variations
- Undirected → e.g. electrical wire in a building
- Directed → e.g. streets (one-way or two-way), flights
- Weighted edges → notation
w(u, v)- e.g. time, cost, or distance for a flight leg
- Weighted vertices also possible
- e.g. time spent waiting at an airport, or cost to stay in a hotel
Undirected Graphs
- Used when connections are mutual → e.g. social friends
- Degree of vertex → # of edges connected to the vertex
- Complete graph → all pairs of vertices are connected
- Bipartite graph → V = V₁ ∪ V₂ and E ⊆ V₁ × V₂
- e.g. jobs and workers, students and classes, people and social clubs
- Multigraph → can have multiple edges between the same pair of vertices (including self-edges)
- Hypergraph → edges can connect more than two vertices
Trees vs. Graphs
- What’s the difference between a tree and a general graph?
- A tree is an acyclic (NO CYCLES), connected graph with exactly one path between any two nodes — it’s also directed
- Trees have a root; graphs do not
Directed Graph (Digraph)
- A → B is not the same as B → A
- In-degree, out-degree → # of edges going in or out
- Path → ⟨v₀, v₁, …, vₖ⟩ where ⟨vᵢ, vᵢ₊₁⟩ ∈ E
- Simple path → path where all vᵢ are distinct
- Cycle → a non-trivial simple path plus ⟨vₖ, v₀⟩ to close it
- DAG → Directed Acyclic Graph (contains no cycles)
- Strongly connected → digraph whose vertices are all reachable from each other
Representations (IMPORTANT — LEARN AND MASTER)
- Adjacency list → for each node, a list of neighbors along its outgoing edges
- Adjacency matrix →
m[v1, v2]holds the weight (or 1/0 for unweighted) - Trade-offs:
- Adjacency list → space efficient, easy to grow
- array of linked lists, similar to how we did hashing
- Adjacency matrix → fast O(1) access, but O(V²) space
- lots of zeroes if sparse
- store cost, or boolean 1 if connected
- if sparse (not many edges) → list is the better option
- Adjacency list → space efficient, easy to grow
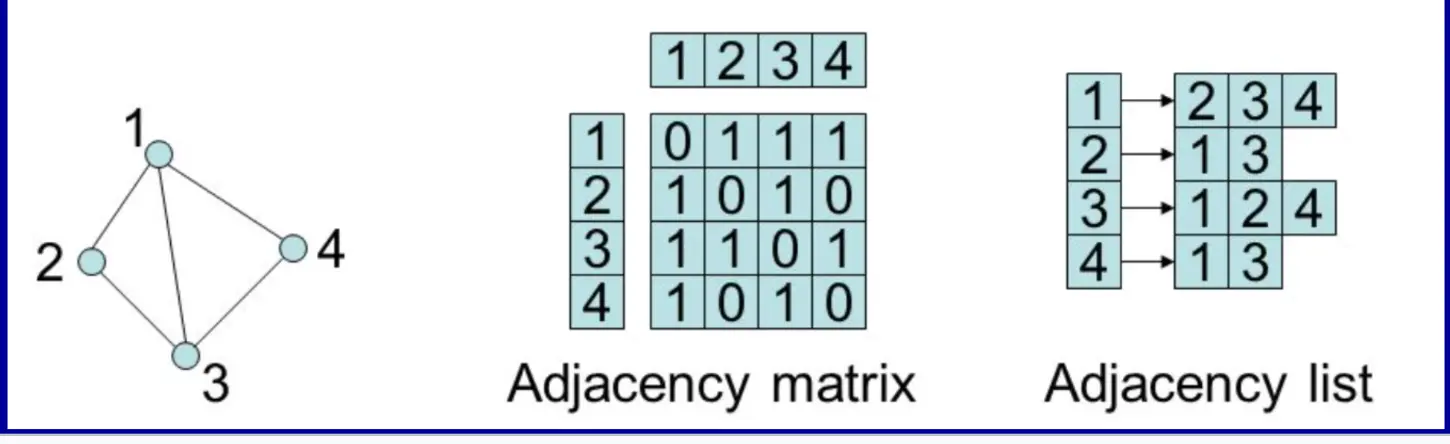
- Store a numerical representation of words as tables (preferably integers)
Decision tree → which representation to use?
| Few edges (sparse) | Many edges (dense) | |
|---|---|---|
| Few vertices | Either works; list slightly leaner | Matrix → fast lookup, small enough |
| Many vertices | Adjacency list → matrix wastes O(V²) on zeroes | Adjacency matrix → O(1) edge lookup matters more than space |
Adding Weights
- Adjacency list → store the weight alongside the neighbor (tuple, or extra data member on the edge node)
- Adjacency matrix → store the weight directly in the matrix cell at the crossing
Graph Search
- What are some possible ways to search a graph?
- Go all the way to the furthest point, back up to the last branch, exhaust that line too, repeat → DFS
- At each node, go one step out until all paths are exhausted, then advance another step → BFS
- Could also go randomly
- Level-order search (by distance away) → close to BFS
Breadth First Search (BFS)
- Analogy → go to university and take ALL the intro courses FIRST; then advance to the next level for each
- “Distance” → number of vertices in path
- Visit vertices in increasing order of distance from the starting point
- Use a queue to store vertices “to visit”
- Not necessarily unique
- Explore breadth first, then depth
- May find the shortest distance to some node
- Breadth First Search animation
BFS finds the shortest path (in # of edges) to the solution.
VertexList bfs(const Graph& graph, Vertex startVertex) {
VertexList result;
// visited[v] → have we already enqueued vertex v? prevents revisiting
vector<bool> visited(graph.size(), false);
// queue of vertices we've discovered but haven't processed yet
queue<Vertex> queue;
// mark the start as visited and put it in the queue
visited[startVertex] = true;
queue.push(startVertex);
while (!queue.empty()) {
// grab the next vertex in FIFO order (closest one we haven't done yet)
Vertex vertex = queue.front();
queue.pop();
result.push_back(vertex);
// look at every neighbor reachable from this vertex (adjacency list)
for (Vertex v : graph.edges_from(vertex))
if (!visited[v]) {
// first time seeing this neighbor → mark and enqueue
visited[v] = true;
queue.push(v);
}
}
return result;
}Depth First Search (DFS)
- Less memory than BFS
- Major example → go as deep as possible in computer science; when you don’t get a job you go to medicine; then you become a plumber
- Explores depth, then neighbors
- Depth in DFS isn’t necessarily the same as distance in BFS
- Discover vertices before we visit
- Use a stack to store nodes “to visit”
- DFS order may not be unique!
- Depth First Search animation
VertexList dfs(const Graph& graph, Vertex startVertex) {
VertexList result;
// visited[v] → have we already pushed vertex v? prevents revisiting
vector<bool> visited(graph.size(), false);
// stack of vertices we've discovered but haven't processed yet (LIFO)
stack<Vertex> stk;
// mark the start as visited and push it
visited[startVertex] = true;
stk.push(startVertex);
while (!stk.empty()) {
// grab the most recently pushed vertex (deepest one we've seen)
Vertex vertex = stk.top();
stk.pop();
result.push_back(vertex);
// look at every neighbor reachable from this vertex
for (Vertex v : graph.edges_from(vertex))
if (!visited[v]) {
// first time seeing this neighbor → mark and push
visited[v] = true;
stk.push(v);
}
}
return result;
}BFS vs. DFS Tradeoffs
| BFS | DFS | |
|---|---|---|
| Data structure | Queue (FIFO) | Stack (LIFO) — or recursion |
| Memory | O(branching width) — can blow up on wide graphs | O(depth) — usually much smaller |
| Finds shortest path? | Yes (in # of edges, unweighted graphs) | No — finds a path, not the shortest |
| Order of visit | Level by level out from source | Down one branch as far as possible before backtracking |
| Best for | Shortest-path queries, level-by-level work | Cycle detection, topo sort, exhaustive exploration |
Iterative Deepening DFS
- NOT MUCH MEMORY and SHORTEST SOLUTION
- (trade-off → redoing work)
- Depth-limited version of DFS, run repeatedly with increasing depth limits, until solution is found
- Optimal like BFS, but uses much less memory
- Iterative Deepening
Topological Sorting
- Operates on a Directed Acyclic Graph (DAG)
- Produces a sorted order where all of a node’s predecessors appear before the node itself
- Useful when computing some property on a graph that requires computations of predecessors
- E.g. scheduling tasks that depend on other tasks
- Tasks → eat food, cook food, mix food, wash food, buy food
- Dependencies → buy → wash → mix → cook → eat
- Topological order →
[buy, wash, mix, cook, eat] - Pre-ordering (when first discovered):
buy(1), wash(2), mix(3), cook(4), eat(5) - Post-ordering (when finished):
eat(1), cook(2), mix(3), wash(4), buy(5)→ reverse post-order gives topo order
- End up with levels of stuff — items on the same level can be done in parallel; everything in a level above requires the level under it
- Coursework prereqs are the classic example
Topological Sort Algorithm (Kahn’s algorithm, in-degree based):
vector<int> topologicalSort(const vector<vector<int>>& graph) { // adjacency list
vector<int> inDegree(graph.size(), 0);
vector<int> result;
queue<int> q;
// Calculate in-degree for each vertex
for (const auto& edges : graph)
for (int vertex : edges)
inDegree[vertex]++;
// Enqueue vertices with in-degree 0 (no prerequisites)
for (int i = 0; i < graph.size(); ++i)
if (inDegree[i] == 0)
q.push(i);
while (!q.empty()) {
int currVertex = q.front(); q.pop();
result.push_back(currVertex);
// Decrease in-degree of adjacent vertices; if any hit 0, they're ready
for (int adjVertex : graph[currVertex])
if (--inDegree[adjVertex] == 0)
q.push(adjVertex);
}
return result;
}Lecture 13: Minimum Spanning Trees (Prim’s, Kruskal’s, Disjoint Sets)
Minimum Spanning Trees (MST)
- Spanning tree
- spanning → connects every vertex
- tree → acyclic (no cycle)
- Start with a connected, undirected, edge-weighted graph G
- A sub-graph with a subset of edges that connects all vertices
- |E| = |V| − 1 → edges is vertices minus one
- Minimum spanning tree
- Sum total of edge weights is minimized
- Edge weights need not be distinct → MST need not be unique
- Example → wiring a house with minimal cable
ACTIVITY → what are some possible approaches?
- Check all possible spanning trees and select the shortest one
- Pick the shortest edge first and try to grow from there
- Choose the shortest path → O(N²)
MST Algorithms
- Two common ones
- Both are greedy algorithms → take the best choice at each opportunity
- Difference is in how the next edge is selected
Prim’s Algorithm
- Grows a single tree
- Start with a single vertex, called the root
- Select the minimum edge connecting (u, v) such that u is already in the spanning tree and v is not
- Grow MST by adding one vertex and one edge at a time
- O(|V|²) without heaps for the priority queue
- O(|E| log |V|) with heaps
NEW NAME (behind me, allergies) → Josiah
Kruskal’s Algorithm
- Grows a set of trees (a forest that eventually merges)
- Start with |V| single-node trees
- Identify the next cheapest edge
- If the edge links two different trees → add it to the MST
- Adding an edge joins two trees into one
- Minimum spanning tree animation
- O(|E| log |V|) → much better in practice
Disjoint Set
- Disjoint-set
- Needed for Kruskal’s MST algorithm
- Answers → are two vertices in the same tree (same set)?
- ACTIVITY → how can we implement union/find for disjoint sets?
- Three operations →
make_set(),union(u, v),find(v)make_set→ make a node whose parent points at itself; do this for every vertex → n disjoint sets to startfind(v)→ who is your representative node? Returns the address of the last node in the chain — should be one step away, since WE ALL POINT TO ONEunion(u, v)→ joins two sets together (collapse them so both point to one leader)
Disjoint-Set Data Structure
- AKA
- union-find data structure, or
- merge-find set
- Wikipedia → Disjoint-set data structure
Union-Find Disjoint Sets
- “Disjoint set” means the sets share no elements
- Create a mapping from vertices (ints) to nodes
make_set(v)→ easy with a vector inside a class- For N items → N linked lists of length 1
- Set the parent of each node to point to itself
find(v)→ returns the last node in the list- The node’s address acts as the set’s identity
union(u, v)→ joins two disjoint sets togetherfind(u).parent = find(v)
Drawback → linked lists can grow long for large sets!
Performance improvements (apply in order):
- Union by size/rank → always have the shorter list point to the root of the longer list
- Path compression → every time we do
union()orfind(), set the parent to the result returned byfind(v)so future lookups are O(1)
Union-Find Disjoint Sets — Resources
Kruskal’s Algorithm in C++
// Edge with two endpoints and a weight
struct Edge {
int u, v;
int weight;
};
vector<Edge> kruskalMST(int numVertices, vector<Edge>& edges) {
vector<Edge> mst;
// 1. Sort edges by weight, ascending → cheapest first
sort(edges.begin(), edges.end(),
[](const Edge& a, const Edge& b) { return a.weight < b.weight; });
// 2. Start with each vertex in its own set
DisjointSet ds(numVertices);
// 3. Walk edges cheapest → most expensive
for (const Edge& e : edges) {
// If u and v are already connected, adding this edge would form a cycle → skip
if (ds.find(e.u) != ds.find(e.v)) {
mst.push_back(e); // edge links two different trees → take it
ds.unionSets(e.u, e.v); // merge the two trees into one
if (mst.size() == numVertices - 1) break; // MST has |V| − 1 edges, done
}
}
return mst;
}Kruskal Example
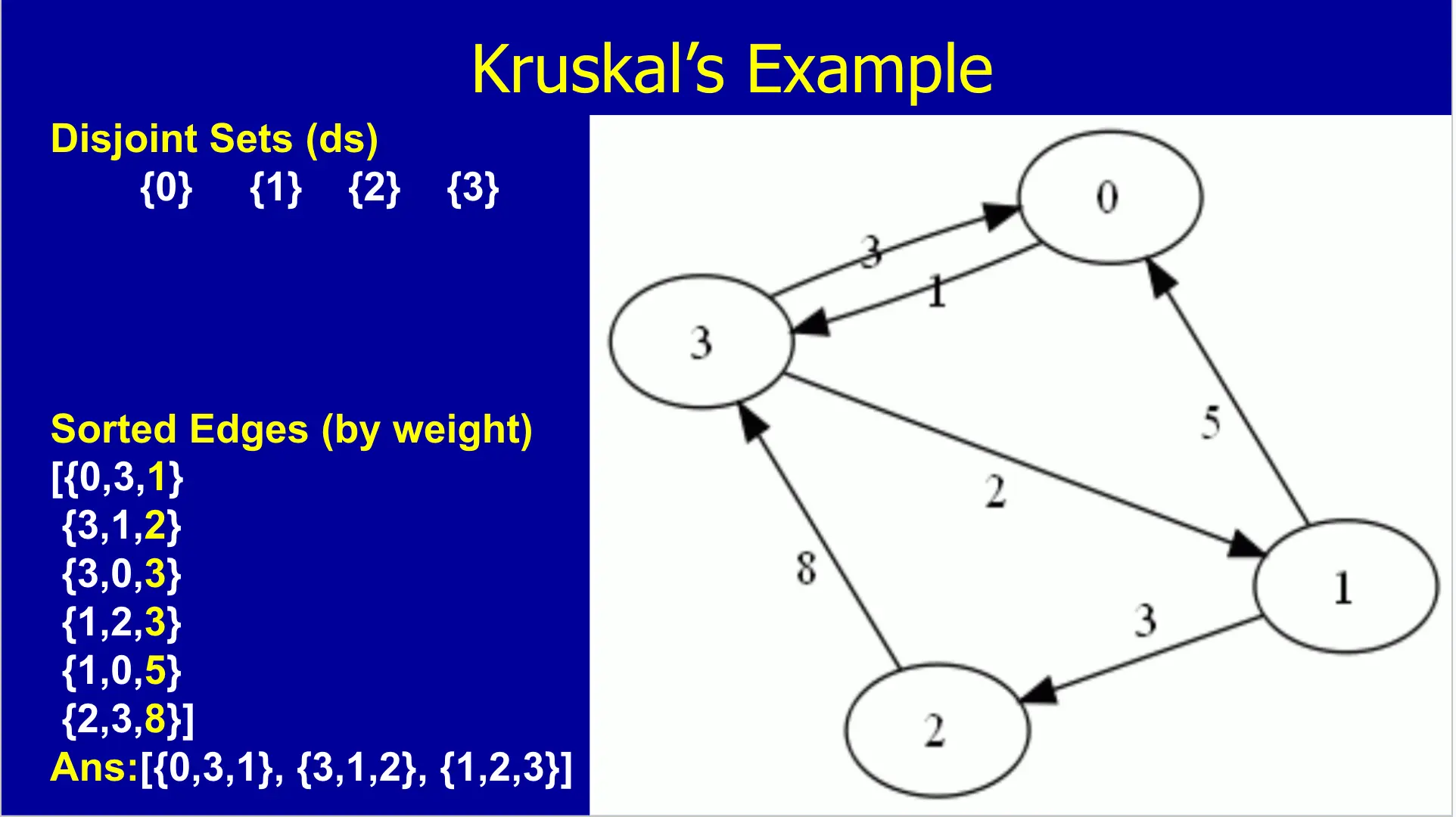
Lecture 14: Single-Source Shortest Path (Dijkstra’s, Word Ladder)
More Graph Problems
- Unweighted graphs → BFS / DFS for traversal and reachability
- Directed Acyclic Graphs (DAGs) → topological sort to order tasks by dependency
- Weighted graphs
- Minimum spanning tree → cheapest set of edges connecting every vertex (covered in Lecture 13)
- Single-source shortest path → cheapest path from one start vertex to every other
- Traveling salesman problem → shortest tour that visits every vertex exactly once (NP-hard)
- Network flow
- Maximum flow → most “stuff” you can push from a source to a sink under edge capacities
- Heuristic → rule-of-thumb to narrow the search space
- “Control the center” is a heuristic for picking a good opening move in chess
Single-Source Shortest Path (SSSP)
- Given
- A graph G = (V, E)
- A single starting vertex s
- Find the lowest-cost path from s to every other vertex
- For unweighted graphs → BFS (every edge treated as cost 1)
- For weighted graphs → several choices
- Dijkstra’s algorithm → only positive weights
- Bellman-Ford → handles negative weights too, O(|V|·|E|)
- A* → heuristic-guided; needs an upper-bound distance estimate to the goal
- GPS routing uses A* with straight-line Euclidean distance as the heuristic
- An example of best-first search
Applications
- Maze games
- Street routing (driving directions)
- Trip planning
- Network packet routing
- Robots navigating around obstacles
- Dijkstra animation
- Example 1 · Example 2
Naive Brute-Force Shortest Path
- Enumerate every simple path from s to t and take the minimum
- Explodes combinatorially → useless beyond toy sizes, but shows what “correct” looks like
// Try every simple path from s to t via DFS, track the smallest total weight
// graph[u] = list of (neighbor, weight) pairs
int bruteForceSSSP(const vector<vector<pair<int,int>>>& graph, int s, int t) {
int n = graph.size();
vector<bool> visited(n, false);
int best = INT_MAX;
function<void(int, int)> dfs = [&](int u, int cost) {
if (u == t) { best = min(best, cost); return; }
visited[u] = true;
for (auto [v, w] : graph[u])
if (!visited[v]) dfs(v, cost + w);
visited[u] = false; // backtrack so other paths can still go through v
};
dfs(s, 0);
return best;
}Dijkstra’s Algorithm
- A greedy algorithm, published by Edsger Dijkstra in 1959
- Maintain distance estimates to every neighbor of s
- Repeatedly pull the unvisited vertex with the shortest known distance, add it to the visited set, then relax (update) the distances of its neighbors
- Does not work on graphs with negative edge weights
- O((|E| + |V|) log |V|) with a binary heap as the priority queue
// Dijkstra's SSSP on a non-negative weighted graph
// graph[u] = list of (neighbor, weight) pairs
// Returns shortest distance from s to every vertex
vector<int> dijkstra(const vector<vector<pair<int,int>>>& graph, int s) {
int n = graph.size();
vector<int> dist(n, INT_MAX);
dist[s] = 0;
// Min-heap of (distance_so_far, vertex)
priority_queue<pair<int,int>, vector<pair<int,int>>, greater<>> pq;
pq.push({0, s});
while (!pq.empty()) {
auto [d, u] = pq.top(); pq.pop();
if (d > dist[u]) continue; // stale entry — already found a shorter path to u
// Relax each outgoing edge of u
for (auto [v, w] : graph[u]) {
if (dist[u] + w < dist[v]) {
dist[v] = dist[u] + w;
pq.push({dist[v], v});
}
}
}
return dist;
}- Walkthrough 1 · Walkthrough 2
- HW9 → read the same graphs from HW8, but compute Dijkstra’s
- Output the path and total cost to each vertex from the start
- Be able to answer questions like → “what is the cost from start to vertex K?”
Word Ladder Problem
- LeetCode (medium/hard) · GeeksforGeeks
- A transformation sequence from
beginWordtoendWordusing a dictionarywordListis a sequencebeginWord → s₁ → s₂ → ... → sₖ → endWord- such that
- every adjacent pair of words differs by a single letter (or one insert/delete)
- every sᵢ (for 1 ≤ i ≤ k) is in
wordList beginWordneed not be inwordList, butendWordmust be
- The problem → find the shortest such transformation sequence
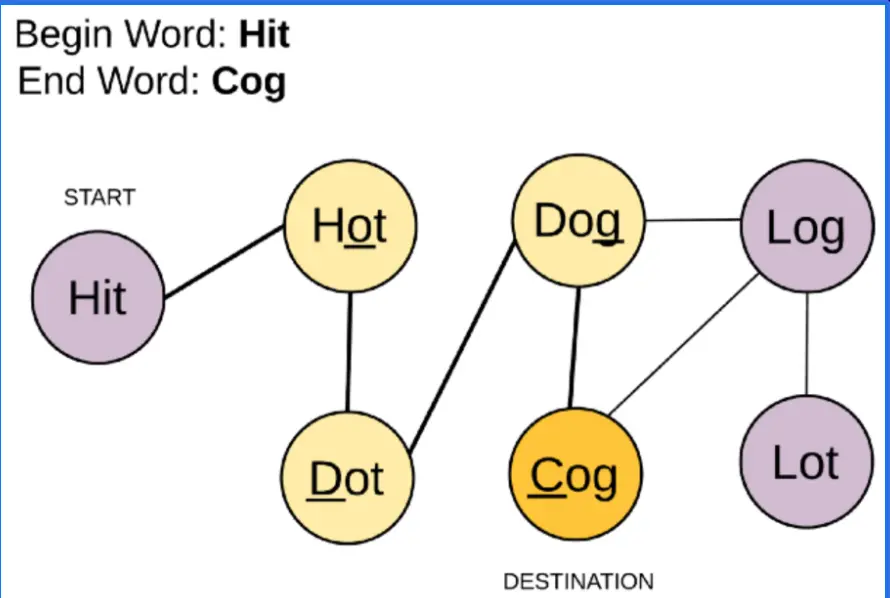
Word Ladder Videos
Solution Sketch
- A solution uses breadth-first search
- Queue holds stacks (each stack is a candidate ladder so far), implemented with
vector - Maintain a
setof words already used so we don’t revisit and loop forever
- Queue holds stacks (each stack is a candidate ladder so far), implemented with
- BFS guarantees the first time we pop
endWordoff the queue, we’ve found a shortest ladder
Course Review
Course Topics
- Time analysis and time complexity
- Lists: Unordered, Ordered, Sorted
- Stacks & Queues
- Hashing and Hash Tables
- Binary Search Trees
- Priority Queues (Binary Heaps)
- Sorting & Searching
- Graph representation
- Graph traversals
- Graph algorithms
Analysis
- T(N) → running time in instructions, worst case
- Accessing during a
forloop counts as + 1 - For
ifstatements we take the worst-case branch - A
returncosts 1 + cost of the expression
- Accessing during a
- Time complexity in Big-O notation
- Measured (empirical) time of algorithms
- Using
Timer.h
- Using
- Interpreting graphs of functions → what are we actually measuring?
- Thinking about our testing data → and the unusual measurements we may get
Lists: Unordered, Ordered, Sorted
- Unordered
- Must use linear search
- Doesn’t matter where you add/remove → so we choose the spot that’s O(1)
- Ordered
- Like class
string
- Like class
- Sorted
- Forces copy-up / copy-down on insert/remove
- Can use binary search to find
Stacks & Queues
- Stack interface (LIFO) →
push(),pop(),top(),isEmpty(),isFull() - Queue interface (FIFO) →
enq(),deq(),front(),isEmpty(),isFull() - Implementations are all constant time:
- Linked list: stack, queue
- Array: stack, queue
Hashing & Hash Tables
- Tables → key/value pairs
- Critical decisions:
- Choose a good hash function
- URLs are hard and most of the time break the hash function
- Choose a table of good size
- How to handle collisions
- Separate chaining
- Open addressing (e.g. linear probing)
- Choose a good hash function
- insert, find, remove can be O(1)
Binary Search Trees
- insert, find, remove can be O(log N)
- Traversals: pre-order, in-order, post-order
- Degenerates to O(N) when keys are nearly sorted
- Fixed with self-balancing trees → AVL, red-black, WAVL, crumple
Sorting & Searching
- O(N²) sorts
- Insertion sort
- Selection sort
- Bubble sort
- O(N log N) sorts
- Quick sort
- Heap sort
- Merge sort
- Sorting visualization videos:
Graph Representation
- Representation:
- Adjacency list
- Adjacency matrix
- What are the trade-offs?
- What did you do for
edges_fromin HW8?VertexList Graph::edges_from(vertex vertex) const
Graph Traversals
- Depth-first (DFS)
- Can get stuck going down a cycle forever → needs a visited set
- Breadth-first (BFS)
- Finds the shortest path to the solution (fewest edges)
- Iterative deepening DFS (IDDFS)
- ELI5: run DFS but only let it go K levels deep, throw it away, then run it again allowing K+1 levels, then K+2, … → a
forloop over the depth limit K that keeps re-running a depth-limited DFS until the goal shows up - Gets BFS’s shortest-path guarantee (finds the shallowest goal first) with DFS’s small O(depth) memory
- Yes it re-explores the shallow nodes every round, but that’s cheap → almost all the nodes live at the deepest level anyway
- ELI5: run DFS but only let it go K levels deep, throw it away, then run it again allowing K+1 levels, then K+2, … → a
- Best-first search
Graph Algorithms
- Topological sort
- Minimum spanning tree: Kruskal’s, Prim’s
- Kruskal’s → be able to derive
- Shortest path: Dijkstra’s, Bellman-Ford, A*